Praca mechaniczna określona jest wzorem. Praca mechaniczna i energia kinetyczna. Przykłady prac mechanicznych
« Fizyka - klasa 10 "
Prawo zachowania energii jest podstawowym prawem natury pozwalającym opisać większość zachodzących zjawisk.
Opis ruchu ciał jest również możliwy za pomocą takich pojęć dynamiki jak praca i energia.
Pamiętaj, czym jest praca i moc w fizyce.
Czy te koncepcje pokrywają się z codziennymi wyobrażeniami na ich temat?
Wszystkie nasze codzienne czynności sprowadzają się do tego, że za pomocą mięśni albo wprawiamy w ruch otaczające ciała i utrzymujemy ten ruch, albo zatrzymujemy poruszające się ciała.
Ciała te to narzędzia (młotek, długopis, piła), w grach - kulki, krążki, szachy. W produkcji i rolnictwo ludzie również wprawiają w ruch narzędzia.
Zastosowanie maszyn znacznie zwiększa wydajność pracy dzięki zastosowaniu w nich silników.
Zadaniem każdego silnika jest wprawienie w ruch korpusów i utrzymanie tego ruchu, pomimo hamowania zarówno zwykłym tarciem, jak i „roboczym” oporem (frez musi nie tylko ślizgać się po metalu, ale uderzając w niego usuwać wióry; pług musi poluzować ziemię itp.). W takim przypadku na poruszający się korpus musi działać siła od strony silnika.
Praca jest zawsze wykonywana w naturze, gdy siła (lub kilka sił) z innego ciała (innych ciał) działa na ciało w kierunku jego ruchu lub przeciw niemu.
Siła grawitacji działa, gdy spada deszcz lub kamień spada z klifu. Jednocześnie pracę wykonuje siła oporu działająca na spadające krople lub na kamień od strony powietrza. Siła sprężystości działa również wtedy, gdy drzewo zginane przez wiatr się prostuje.
Definicja stanowiska.
Drugie prawo Newtona w formie impulsowej ∆=∆t pozwala określić, jak prędkość ciała zmienia się w wartości bezwzględnej i kierunku, jeśli działa na nie siła w czasie Δt.
Oddziaływanie na ciała sił, prowadzące do zmiany modułu ich prędkości, charakteryzuje się wartością zależną zarówno od sił, jak i od przemieszczeń ciał. Ta wielkość w mechanice nazywa się praca siły.

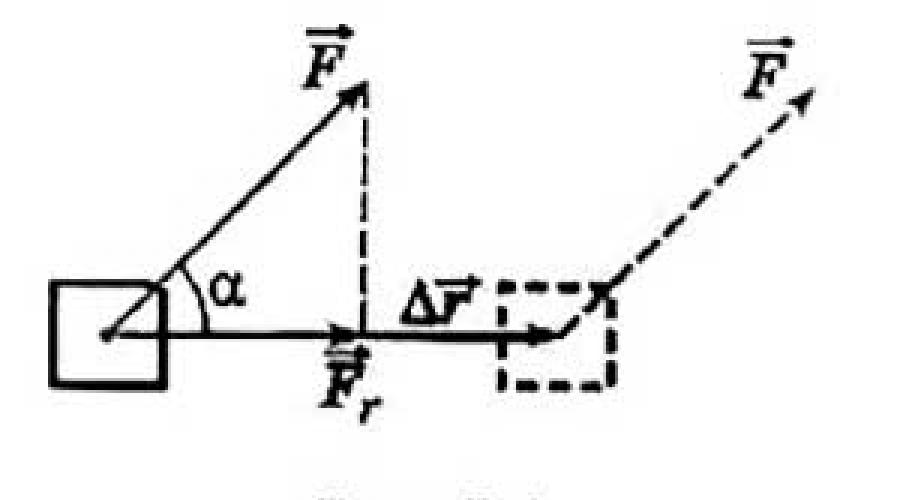
Modulo zmiana prędkości jest możliwa tylko wtedy, gdy rzut siły F r na kierunek ruchu ciała jest niezerowy. To właśnie ta projekcja determinuje działanie siły, która zmienia prędkość modulo ciała. Ona wykonuje pracę. Dlatego pracę można uznać za iloczyn siły F r przez moduł przemieszczenia |Δ| (rys. 5.1):
А = F r |Δ|. (5.1)
Jeżeli kąt między siłą a przemieszczeniem jest oznaczony przez α, to F r = Fcosα.
Dlatego praca jest równa:
A = |Δ|cosα. (5.2)
Nasza codzienna koncepcja pracy różni się od definicji pracy w fizyce. Trzymasz ciężką walizkę i wydaje ci się, że wykonujesz pracę. Jednak z punktu widzenia fizyki twoja praca jest równa zeru.
Praca stałej siły jest równa iloczynowi modułów siły i przesunięcia punktu przyłożenia siły i cosinusa kąta między nimi.
Ogólnie rzecz biorąc, podczas przeprowadzki ciało stałe przemieszczenia jej różnych punktów są różne, ale przy określaniu pracy siły, my Δ zrozumieć ruch jego punktu zastosowania. Na ruch do przodu ciała sztywnego ruch wszystkich jego punktów pokrywa się z ruchem punktu przyłożenia siły.
Praca, w przeciwieństwie do siły i przemieszczenia, nie jest wektorem, ale wielkością skalarną. Może być dodatnia, ujemna lub zerowa.
Znak pracy jest określony przez znak cosinusa kąta między siłą a przemieszczeniem. Jeśli α< 90°, то А >0 od cosinusa ostre rogi pozytywny. Dla α > 90° praca jest ujemna, ponieważ cosinus tępe rogi negatywny. Przy α = 90° (siła jest prostopadła do przemieszczenia) praca nie jest wykonywana.
Jeżeli na ciało działa kilka sił, to rzut siły wypadkowej na przemieszczenie jest równy sumie rzutów poszczególnych sił:
F r = F 1r + F 2r + ... .
Dlatego dla pracy siły wypadkowej otrzymujemy
A = F 1r |Δ| + F 2r |Δ| + ... = A 1 + A 2 + .... (5.3)
Jeśli na ciało działa kilka sił, to pełna praca(suma algebraiczna pracy wszystkich sił) jest równa pracy siły wypadkowej.
Pracę wykonaną siłą można przedstawić graficznie. Wyjaśnijmy to, przedstawiając na rysunku zależność rzutu siły od współrzędnej ciała poruszającego się po linii prostej.

Pozwól ciału poruszać się wzdłuż osi OX (ryc. 5.2), a następnie
Fcosα = F x , |Δ| = Δ x.
Za pracę siły dostajemy
А = F|Δ|cosα = F x Δx.

Oczywiście obszar prostokąta zacieniony na rysunku (5.3, a) jest liczbowo równy pracy wykonanej, gdy ciało przesuwa się z punktu o współrzędnej x1 do punktu o współrzędnej x2.
Wzór (5.1) obowiązuje, gdy rzut siły na przemieszczenie jest stały. W przypadku trajektorii zakrzywionej, siły stałej lub zmiennej, trajektorię dzielimy na małe odcinki, które można uznać za prostoliniowe, a rzut siły na małe przemieszczenie Δ - stały.
 Następnie obliczanie pracy wykonanej na każdym przemieszczeniu Δ
a następnie podsumowując te prace, określamy pracę siły na ostateczne przemieszczenie (ryc. 5.3, b).
Następnie obliczanie pracy wykonanej na każdym przemieszczeniu Δ
a następnie podsumowując te prace, określamy pracę siły na ostateczne przemieszczenie (ryc. 5.3, b). Jednostka pracy.
Jednostkę pracy można ustawić za pomocą podstawowego wzoru (5.2). Jeżeli podczas ruchu ciała na jednostkę długości działa na nie siła, której moduł jest równy jeden, a kierunek siły pokrywa się z kierunkiem ruchu jej punktu przyłożenia (α = 0), to praca będzie równa jedności. W systemie międzynarodowym (SI) jednostką pracy jest dżul (oznaczony J):
1 J = 1 N 1 m = 1 N m.
Dżul to praca wykonana przez siłę 1 N przy przemieszczeniu 1, jeśli kierunki siły i przemieszczenia pokrywają się.
Często używa się wielu jednostek pracy - kilodżul i megadżul:
1 kJ = 1000 J,
1 MJ = 1000000 J.
Pracę można wykonać w długim okresie czasu lub w bardzo krótkim czasie. W praktyce jednak nie jest obojętne, czy pracę można wykonać szybko, czy wolno. Czas, w którym wykonywana jest praca, determinuje wydajność każdego silnika. Mały silnik elektryczny może wykonać dużo pracy, ale zajmie to dużo czasu. Dlatego wraz z pracą wprowadzana jest wartość charakteryzująca szybkość jej wytwarzania - moc.
Moc to stosunek pracy A do przedziału czasu Δt, dla którego ta praca jest wykonywana, tj. moc to tempo pracy:
Podstawiając we wzorze (5.4) zamiast pracy A jej wyrażenie (5.2), otrzymujemy
Jeśli więc siła i prędkość ciała są stałe, to moc jest równa iloczynowi modułu wektora siły przez moduł wektora prędkości i cosinus kąta między kierunkami tych wektorów. Jeżeli wielkości te są zmiennymi, to ze wzoru (5.4) można wyznaczyć średnią moc podobnie jak w definicji Średnia prędkość ruchy ciała.
Pojęcie mocy jest wprowadzane w celu oceny pracy w jednostce czasu wykonywanej przez jakiś mechanizm (pompa, dźwig, silnik maszyny itp.). Dlatego we wzorach (5.4) i (5.5) oznacza to zawsze siłę ciągu.
W SI moc wyrażana jest w postaci waty (W).
Moc wynosi 1 W, jeśli praca równa 1 J zostanie wykonana w ciągu 1 sekundy.
Wraz z watami stosowane są większe (wielokrotne) jednostki mocy:
1 kW (kilowat) = 1000 W,
1 MW (megawat) = 1 000 000 W.
Czy wiesz, czym jest praca? Bez wątpienia. Czym jest praca, wie każdy człowiek, pod warunkiem, że urodził się i żyje na planecie Ziemia. Co to jest praca mechaniczna?
Ta koncepcja jest również znana większości ludzi na planecie, chociaż niektóre osoby mają dość mgliste pojęcie o tym procesie. Ale teraz nie chodzi o nich. Jeszcze mniej osób ma pojęcie o tym, co praca mechaniczna z punktu widzenia fizyki. W fizyce praca mechaniczna nie jest pracą człowieka dla pożywienia, jest to wielkość fizyczna, która może być całkowicie niezwiązana ani z osobą, ani z żadną inną żywą istotą. Jak to? Teraz zastanówmy się.
Praca mechaniczna w fizyce
Podajmy dwa przykłady. W pierwszym przykładzie wody rzeki, zderzając się z otchłanią, hałaśliwie opadają w postaci wodospadu. Drugi przykład to osoba, która trzyma wyciągnięte ręce ciężki przedmiot, na przykład, trzyma popękany dach nad werandą Chatka od upadku, podczas gdy jego żona i dzieci gorączkowo szukają czegoś, co mogłoby ją wesprzeć. Kiedy wykonywane są prace mechaniczne?
Definicja pracy mechanicznej
Prawie każdy bez wahania odpowie: w drugim. I będą się mylić. Sprawa jest dokładnie odwrotna. W fizyce opisana jest praca mechaniczna następujące definicje: praca mechaniczna jest wykonywana, gdy na ciało działa siła i ono się porusza. Praca mechaniczna jest wprost proporcjonalna do przyłożonej siły i przebytej odległości.
Formuła pracy mechanicznej
Pracę mechaniczną określa wzór:
gdzie A to praca,
F - siła,
s - przebyta odległość.
Tak więc, pomimo całego heroizmu zmęczonego posiadacza dachu, praca przez niego wykonana jest równa zeru, ale woda, opadająca pod wpływem grawitacji z wysokiego klifu, wykonuje najbardziej mechaniczną pracę. To znaczy, jeśli pchamy ciężką szafę bez powodzenia, to praca, którą wykonaliśmy z punktu widzenia fizyki, będzie równa zeru, mimo że przykładamy dużą siłę. Ale jeśli przesuniemy szafkę na pewną odległość, to wykonamy pracę równą iloczynowi przyłożonej siły przez odległość, o jaką przesunęliśmy ciało.
Jednostka pracy to 1 J. Jest to praca wykonywana przez siłę 1 niutona w celu przesunięcia ciała o odległość 1 m. Jeżeli kierunek przyłożonej siły pokrywa się z kierunkiem ruchu ciała, to dana siła zobowiązuje się pozytywna praca. Przykładem jest popychanie ciała, które się porusza. A w przypadku, gdy siła jest przyłożona w kierunku przeciwnym do ruchu ciała, na przykład siła tarcia, to siła ta działa ujemnie. Jeżeli przyłożona siła nie wpływa w żaden sposób na ruch ciała, to siła wytworzona przez tę pracę jest równa zeru.
Prawie każdy bez wahania odpowie: w drugim. I będą się mylić. Sprawa jest dokładnie odwrotna. W fizyce opisana jest praca mechaniczna następujące definicje: praca mechaniczna jest wykonywana, gdy na ciało działa siła i ono się porusza. Praca mechaniczna jest wprost proporcjonalna do przyłożonej siły i przebytej odległości.
Formuła pracy mechanicznej
Pracę mechaniczną określa wzór:
gdzie A to praca, F to siła, s to przebyta odległość.
POTENCJAŁ(funkcja potencjalna), pojęcie, które charakteryzuje szeroką klasę fizycznych pól sił (elektrycznych, grawitacyjnych itp.) i ogólnie pól wielkości fizycznych reprezentowanych przez wektory (pole prędkości płynu itp.). W ogólnym przypadku potencjał pola wektorowego a( x,tak,z) jest taką funkcją skalarną ty(x,tak,z) że a=grad
35. Przewodniki w polu elektrycznym. Moc elektryczna.przewodniki w polu elektrycznym. Przewodniki to substancje charakteryzujące się obecnością w nich dużej liczby bezpłatnych nośników ładunku, które mogą poruszać się pod wpływem pola elektrycznego. Przewodniki obejmują metale, elektrolity, węgiel. W metalach nośnikami wolnych ładunków są elektrony zewnętrznych powłok atomów, które w wyniku interakcji atomów całkowicie tracą połączenie z „swoimi” atomami i stają się własnością całego przewodnika jako całości. Swobodne elektrony uczestniczą w ruchu termicznym jak cząsteczki gazu i mogą poruszać się w metalu w dowolnym kierunku. Pojemność elektryczna- charakterystyka przewodnika, miara jego zdolności do gromadzenia ładunku elektrycznego. W teorii obwody elektryczne pojemność jest wzajemną pojemnością między dwoma przewodnikami; parametr elementu pojemnościowego obwodu elektrycznego, przedstawiony w postaci sieci dwuzaciskowej. Taka pojemność jest definiowana jako stosunek wielkości ładunku elektrycznego do różnicy potencjałów między tymi przewodnikami
36. Pojemność płaskiego kondensatora.
Pojemność płaskiego kondensatora.
To. pojemność płaskiego kondensatora zależy tylko od jego wielkości, kształtu i stałej dielektrycznej. Aby stworzyć kondensator o dużej pojemności, konieczne jest zwiększenie powierzchni płytek i zmniejszenie grubości warstwy dielektrycznej.
37. Oddziaływanie magnetyczne prądów w próżni. Prawo Ampera.Prawo Ampera. W 1820 r. Ampère (francuski naukowiec (1775-1836)) ustanowił eksperymentalnie prawo, według którego można obliczyć siła działająca na element przewodzący o długości z prądem.
gdzie jest wektorem indukcji magnetycznej, jest wektorem długości elementu przewodnika poprowadzonego w kierunku prądu.
Moduł siły , gdzie jest kątem między kierunkiem prądu w przewodniku a kierunkiem pola magnetycznego. Dla przewodu prostego z prądem w polu jednorodnym
Kierunek działającej siły można określić za pomocą zasady lewej ręki:
Jeśli dłoń lewej ręki jest ustawiona tak, że normalny (do prądu) składnik pole magnetyczne wszedł do dłoni i cztery wyciągnięte palce są skierowane wzdłuż prądu, a następnie kciuk wskaże kierunek, w którym działa siła Ampère.
38. Natężenie pola magnetycznego. Prawo Biota-Savarta-Laplace'aSiła pola magnetycznego(oznaczenie standardowe H ) - wektor wielkość fizyczna, równa różnicy wektora Indukcja magnetyczna B oraz wektor namagnesowania J .
W Międzynarodowy układ jednostek (SI): ![]() gdzie- stała magnetyczna.
gdzie- stała magnetyczna.
Prawo BSL. Prawo określające pole magnetyczne pojedynczego elementu prądu 
39. Zastosowania prawa Biota-Savarta-Laplace'a. Dla pola prądu stałego
Do okrągłej pętli.
A dla elektrozaworu![]()
40. Indukcja pola magnetycznego Pole magnetyczne charakteryzuje się wielkością wektorową, zwaną indukcją pola magnetycznego (wielkość wektorowa, która jest siłą charakterystyczną pola magnetycznego w danym punkcie przestrzeni). MI. (B) nie jest to siła działająca na przewodniki, jest to wielkość, którą można znaleźć przez daną siłę zgodnie z następującym wzorem: B \u003d F / (I * l) (Słownie: Moduł wektora MI. (B) jest równy stosunkowi moduł siły F, z jaką pole magnetyczne działa na przewodnik przewodzący prąd umieszczony prostopadle do linii magnetycznych, do natężenia prądu w przewodniku I i długości przewodnika l. Indukcja magnetyczna zależy tylko od pola magnetycznego. W związku z tym indukcję można uznać za ilościową charakterystykę pola magnetycznego. Określa, z jaką siłą (siła Lorentza) pole magnetyczne działa na ładunek poruszający się z prędkością. ![]() MI jest mierzony w Tesli (1 T). W tym przypadku 1 Tl \u003d 1 N / (A * m). MI ma kierunek. Graficznie można go narysować jako linie. W jednolitym polu magnetycznym MI są równoległe, a wektor MI będzie skierowany w ten sam sposób we wszystkich punktach. W przypadku niejednorodnego pola magnetycznego, na przykład pola wokół przewodnika z prądem, wektor indukcji magnetycznej zmieni się w każdym punkcie przestrzeni wokół przewodnika, a styczne do tego wektora utworzą koncentryczne okręgi wokół przewodnika.
MI jest mierzony w Tesli (1 T). W tym przypadku 1 Tl \u003d 1 N / (A * m). MI ma kierunek. Graficznie można go narysować jako linie. W jednolitym polu magnetycznym MI są równoległe, a wektor MI będzie skierowany w ten sam sposób we wszystkich punktach. W przypadku niejednorodnego pola magnetycznego, na przykład pola wokół przewodnika z prądem, wektor indukcji magnetycznej zmieni się w każdym punkcie przestrzeni wokół przewodnika, a styczne do tego wektora utworzą koncentryczne okręgi wokół przewodnika.
41. Ruch cząstki w polu magnetycznym. Siła Lorentza. a) - Jeśli cząsteczka wlatuje w obszar jednorodnego pola magnetycznego, a wektor V jest prostopadły do wektora B, to porusza się ona po okręgu o promieniu R=mV/qB, ponieważ siła Lorentza Fl=mV^2 /R pełni rolę siły dośrodkowej. Okres obrotu wynosi T=2piR/V=2pim/qB i nie zależy od prędkości cząstki (dotyczy to tylko V<<скорости света) - Если угол между векторами V и B не равен 0 и 90 градусов, то частица в однородном магнитном поле движется по винтовой линии. - Если вектор V параллелен B, то частица движется по прямой линии (Fл=0). б) Силу, действующую со стороны магнитного поля на движущиеся в нем заряды, называют силой Лоренца.
Siła L. jest określona zależnością: Fl = q V B sina (q to wartość poruszającego się ładunku; V to moduł jego prędkości; B to moduł wektora indukcji pola magnetycznego; alfa to kąt między wektor V i wektor B) Siła Lorentza jest prostopadła do prędkości i dlatego nie działa, nie zmienia modułu prędkości ładunku i jego energii kinetycznej. Ale kierunek prędkości zmienia się w sposób ciągły. Siła Lorentza jest prostopadła do wektorów B i v, a jej kierunek określa się przy użyciu tej samej zasady lewej ręki, co kierunek siły Ampère'a: jeśli lewa ręka jest ustawiona tak, że składowa indukcji magnetycznej B jest prostopadła do prędkość ładunku, wchodzi do dłoni, a cztery palce są skierowane wzdłuż ruchu ładunku dodatniego (przeciwko ruchowi ładunku ujemnego), wtedy kciuk zgięty o 90 stopni wskaże kierunek siły Lorentza działającej na ładunek F l. 
1.5. PRACA MECHANICZNA I ENERGIA KINETYCZNA
Pojęcie energii. energia mechaniczna. Praca jest ilościową miarą zmiany energii. Praca sił wypadkowych. Praca sił w mechanice. Pojęcie władzy. Energia kinetyczna jako miara ruchu mechanicznego. Zmiana komunikacji energia sieciowa z pracą sił wewnętrznych i zewnętrznych.Energia kinetyczna układu w różnych układach odniesienia.Twierdzenie Koeniga.
Energia - jest uniwersalną miarą różnych form ruchu i interakcji. M energia mechaniczna opisuje sumę potencjałorazenergia kinetyczna, dostępne w komponentach układ mechaniczny . energia mechaniczna- jest to energia związana z ruchem przedmiotu lub jego pozycją, zdolnością do wykonywania pracy mechanicznej.
Wymuś pracę - jest to ilościowa charakterystyka procesu wymiany energii między oddziałującymi ciałami.
Pozwól cząstce poruszać się po jakiejś trajektorii 1-2 pod działaniem siły (ryc. 5.1). Ogólnie rzecz biorąc, siła w procesie
ruch cząstek może zmieniać się zarówno pod względem wartości bezwzględnej, jak i kierunku. Rozważmy, jak pokazano na rysunku 5.1, przemieszczenie elementarne , w ramach którego siła może być uważana za stałą.
Działanie siły na przemieszczenie charakteryzuje się wartością równą iloczynowi skalarnemu, który nazywa się praca podstawowa siły w ruchu. Może być również przedstawiony w innej formie:
![]() ,
,
gdzie jest kątem między wektorami i jest ścieżką elementarną, zaznaczono rzut wektora na wektor (ryc. 5.1).
Tak więc elementarna praca siły na przemieszczenie
|
|
Wartość jest algebraiczna: w zależności od kąta między wektorami siły i/lub znaku rzutu wektora siły na wektor przemieszczenia może być dodatnia lub ujemna, a w szczególności równa zeru, jeśli np. . Jednostką SI dla pracy jest dżul, w skrócie J.
Podsumowując wyrażenie (całkujące) (5.1) po wszystkich elementarnych odcinkach ścieżki od punktu 1 do punktu 2, znajdujemy pracę siły na dane przemieszczenie:
widać, że praca elementarna A jest liczbowo równa polu zacieniowanego paska, a praca A na drodze z punktu 1 do punktu 2 to pole figury ograniczone krzywą, rzędne 1 i 2 oraz oś s. W tym przypadku obszar figury nad osią s jest przyjmowany ze znakiem plus (odpowiada to pracy dodatniej), a obszar figury pod osią s jest przyjmowany ze znakiem znak minus (odpowiada pracy negatywnej).
Rozważ przykłady do obliczania pracy. Praca siły sprężystej, gdzie jest promieniem wektora cząstki A względem punktu O (rys. 5.3).
Przesuńmy cząstkę A, na którą działa ta siła, po dowolnej drodze z punktu 1 do punktu 2. Najpierw znajdźmy pracę elementarną siły na przemieszczenie elementarne:
![]() .
.
Produkt skalarny ![]() gdzie jest rzut wektora przemieszczenia na wektor . Rzut ten jest równy przyrostowi modułu wektora, dlatego i
gdzie jest rzut wektora przemieszczenia na wektor . Rzut ten jest równy przyrostowi modułu wektora, dlatego i
Teraz obliczamy pracę tej siły do końca, czyli całkujemy ostatnie wyrażenie z punktu 1 do punktu 2:
|
|
Obliczmy pracę siły grawitacyjnej (lub matematycznie podobnej siły kulombowskiej). Niech na początku wektora (rys. 5.3) znajduje się stała masa punktowa (ładunek punktowy). Wyznaczmy pracę siły grawitacyjnej (kulombowskiej) podczas przemieszczania cząstki A z punktu 1 do punktu 2 po dowolnej ścieżce. Siłę działającą na cząstkę A można przedstawić w następujący sposób:
![]()
gdzie parametr dla oddziaływania grawitacyjnego wynosi , a dla oddziaływania kulombowskiego jego wartość wynosi . Obliczmy najpierw pracę elementarną tej siły na przemieszczenie
![]()
Podobnie jak w poprzednim przypadku iloczyn skalarny wynosi zatem
![]() .
.
Praca tej siły od punktu 1 do punktu 2
|
|

Rozważmy teraz pracę jednolitej siły grawitacji. Siłę tę zapisujemy w postaci, w której wskazany jest wektor jednostkowy osi pionowej z o kierunku dodatnim (ryc. 5.4). Elementarna praca grawitacji na przemieszczenie
![]()
Produkt skalarny ![]() gdzie rzut na wektor jednostkowy jest równy przyrostowi współrzędnej z. Dlatego wyrażenie oznaczające pracę przyjmuje formę
gdzie rzut na wektor jednostkowy jest równy przyrostowi współrzędnej z. Dlatego wyrażenie oznaczające pracę przyjmuje formę
Praca danej siły od punktu 1 do punktu 2
|
|

Rozważane siły są interesujące w tym sensie, że ich praca, jak widać ze wzorów (5.3) - (5.5), nie zależy od kształtu drogi między punktami 1 i 2, a jedynie od położenia tych punktów . Ta bardzo ważna cecha tych sił jest jednak nieodłączna od wszystkich sił. Na przykład siła tarcia nie ma tej właściwości: praca tej siły zależy nie tylko od położenia punktu początkowego i końcowego, ale także od kształtu ścieżki między nimi.
Do tej pory mówiliśmy o pracy jednej siły. Jeżeli na cząstkę w ruchu działa kilka sił, których wypadkowa, to łatwo wykazać, że praca siły wynikowej na określone przemieszczenie jest równa sumie algebraicznej pracy wykonanej przez każdą z sił oddzielnie na tej samej przemieszczeniu. Naprawdę,
Wprowadźmy nową wielkość - moc. Służy do opisania tempa wykonywania pracy. Moc , a-priory, - to praca wykonana przez siłę na jednostkę czasu? . Jeśli przez pewien czas siła działa, to moc rozwinięta przez tę siłę w danym momencie jest. Biorąc to pod uwagę, otrzymujemy
Jednostką mocy w układzie SI jest wat, w skrócie W.
Tak więc moc wytworzona przez siłę jest równa iloczynowi skalarnemu wektora siły i wektora prędkości, z jaką porusza się punkt przyłożenia tej siły. Podobnie jak praca, potęga jest wielkością algebraiczną.
Znając siłę siły, można również znaleźć pracę, jaką ta siła wykonuje w przedziale czasu t. Rzeczywiście, reprezentując całkę w (5.2) w postaci ![]() dostajemy
dostajemy
Powinniśmy również zwrócić uwagę na jedną bardzo istotną okoliczność. Mówiąc o pracy (lub władzy), należy w każdym przypadku jasno wskazać lub wyobrazić sobie tę pracę jaki rodzaj siły?(lub sił) oznacza. W przeciwnym razie z reguły nieporozumienia są nieuniknione.
Rozważ koncepcję energia kinetyczna cząstek. Niech cząstka masy t porusza się pod działaniem pewnej siły (w ogólnym przypadku siła ta może być wypadkową kilku sił). Znajdźmy elementarną pracę, jaką ta siła wykonuje na elementarne przemieszczenie. Mając to na uwadze i , piszemy
![]() .
.
Produkt skalarny ![]() gdzie jest rzut wektora na kierunek wektora . Rzut ten jest równy - przyrostowi modułu wektora prędkości. Dlatego praca podstawowa
gdzie jest rzut wektora na kierunek wektora . Rzut ten jest równy - przyrostowi modułu wektora prędkości. Dlatego praca podstawowa
Wynika z tego, że praca powstałej siły idzie w kierunku przyrostu pewnej wartości w nawiasie, która nazywa się energia kinetyczna cząstki.
oraz przy przejściu z punktu 1 do punktu 2
|
|
(5. 10 ) |
tj. przyrost energii kinetycznej cząstki przy pewnym przemieszczeniu jest równy sumie algebraicznej pracy wszystkich sił działając na cząstkę przy tym samym przemieszczeniu. Jeśli wtedy, tj. energia kinetyczna cząstki wzrasta; jeśli tak jest, energia kinetyczna maleje.
Równanie (5.9) można również przedstawić w innej postaci, dzieląc obie jego części przez odpowiedni przedział czasu dt:
|
|
(5. 11 ) |
Oznacza to, że pochodna czasu energii kinetycznej cząstki jest równa mocy N powstałej siły działającej na cząstkę.
Teraz przedstawmy koncepcję energia kinetyczna układu . Rozważ dowolny układ cząstek w jakimś układzie odniesienia. Niech cząsteczka układu ma w danej chwili energię kinetyczną. Przyrost energii kinetycznej każdej cząstki jest równy, zgodnie z (5.9), pracy wszystkich sił działających na tę cząstkę: Znajdźmy podstawową pracę, którą wykonują wszystkie siły działające na wszystkie cząstki układu:
gdzie jest całkowita energia kinetyczna układu. Zauważ, że energia kinetyczna układu to ilość przyłączeniowy : jest równa sumie energii kinetycznych poszczególnych części układu, niezależnie od tego, czy oddziałują ze sobą, czy nie.
Więc, przyrost energii kinetycznej układu jest równy pracy wykonanej przez wszystkie siły działające na wszystkie cząstki układu. Z elementarnym przemieszczeniem wszystkich cząstek
|
(5.1 2 ) |
i w końcowej części
tj. pochodna energii kinetycznej układu względem czasu jest równa całkowitej mocy wszystkich sił działających na wszystkie cząstki układu,
Twierdzenie Koeniga: energia kinetyczna K układy cząstek można przedstawić jako sumę dwóch wyrazów: a) energia kinetyczna mV c 2 /2 wyimaginowany punkt materialny, którego masa jest równa masie całego układu, a prędkość pokrywa się z prędkością środka masy; b) energia kinetyczna K rel układ cząstek obliczany w układzie środka masy.
Przed ujawnieniem tematu „Jak mierzy się pracę”, należy zrobić małą dygresję. Wszystko na tym świecie podlega prawom fizyki. Każdy proces lub zjawisko można wyjaśnić na podstawie pewnych praw fizyki. Dla każdej mierzalnej wielkości istnieje jednostka, w której zwyczajowo ją mierzy się. Jednostki miary są stałe i mają takie samo znaczenie na całym świecie.
Jpg?.jpg 600w
System Jednostek Międzynarodowych
Powód tego jest następujący. W 1960 roku na jedenastej generalnej konferencji miar i wag przyjęto system miar uznawany na całym świecie. System ten został nazwany Le Système International d'Unités, SI (SI System International). System ten stał się podstawą definicji jednostek miar akceptowanych na całym świecie oraz ich proporcji.
Terminy fizyczne i terminologia
W fizyce jednostka do pomiaru pracy siły nazywa się J (Joule), na cześć angielskiego fizyka Jamesa Joule, który wniósł wielki wkład w rozwój sekcji termodynamiki w fizyce. Jeden dżul jest równy pracy wykonanej przez siłę jednego N (Newtona), gdy jej przyłożenie przesuwa się o jeden M (metr) w kierunku siły. Jedno N (Newton) jest równe sile o masie 1 kg (kilogram) przy przyspieszeniu 1 m/s2 (metr na sekundę) w kierunku siły.
Jpg?.jpg 600w
Wzór na znalezienie pracy
Notatka. W fizyce wszystko jest ze sobą powiązane, wykonanie jakiejkolwiek pracy wiąże się z wykonywaniem dodatkowych czynności. Przykładem jest wentylator domowy. Gdy wentylator jest włączony, łopatki wentylatora zaczynają się obracać. Obrotowe łopatki oddziałują na przepływ powietrza, nadając mu kierunkowy ruch. To efekt pracy. Ale do wykonania pracy niezbędny jest wpływ innych sił zewnętrznych, bez których wykonanie działania jest niemożliwe. Należą do nich siła prądu elektrycznego, moc, napięcie i wiele innych powiązanych ze sobą wartości.
Prąd elektryczny w swej istocie jest uporządkowanym ruchem elektronów w przewodniku w jednostce czasu. Prąd elektryczny opiera się na cząstkach naładowanych dodatnio lub ujemnie. Nazywane są ładunkami elektrycznymi. Oznaczony literami C, q, Kl (wisiorek), nazwany na cześć francuskiego naukowca i wynalazcy Charlesa Coulomba. W układzie SI jest to jednostka miary liczby naładowanych elektronów. 1 C jest równa objętości przepływających cząstek naładowanych przekrój poprzeczny dyrygent na jednostkę czasu. Jednostką czasu jest jedna sekunda. Wzór na ładunek elektryczny pokazano poniżej na rysunku.
Jpg?.jpg 600w
Wzór na znalezienie ładunku elektrycznego
Siła prądu elektrycznego jest oznaczona literą A (amper). Amper to jednostka w fizyce, która charakteryzuje pomiar pracy siły zużywanej na przemieszczanie ładunków wzdłuż przewodnika. W swej istocie Elektryczność jest uporządkowanym ruchem elektronów w przewodniku pod wpływem pole elektromagnetyczne. Przez przewodnik rozumie się materiał lub stopioną sól (elektrolit), który ma niewielką odporność na przechodzenie elektronów. Na siłę prądu elektrycznego wpływają dwie wielkości fizyczne: napięcie i rezystancja. Zostaną one omówione poniżej. Prąd jest zawsze wprost proporcjonalny do napięcia i odwrotnie proporcjonalny do rezystancji.
Jpg?.jpg 600w, https://elquanta.ru/wp-content/uploads/2018/03/risunok-4-768x552..jpg 800w
Wzór na znalezienie aktualnej siły
Jak wspomniano powyżej, prąd elektryczny to uporządkowany ruch elektronów w przewodniku. Ale jest jedno zastrzeżenie: do ich ruchu potrzebny jest pewien wpływ. Efekt ten powstaje poprzez tworzenie potencjalnej różnicy. Ładunek elektryczny może być dodatnia lub ujemna. Ładunki dodatnie zawsze mają tendencję do ładunków ujemnych. Jest to konieczne dla równowagi systemu. Różnica między liczbą cząstek naładowanych dodatnio i ujemnie nazywana jest napięciem elektrycznym.
Gif?.gif 600w
Wzór na znalezienie napięcia
Moc to ilość energii zużyta na wykonanie pracy o wartości jednego J (dżula) w czasie jednej sekundy. Jednostką miary w fizyce jest W (wat), w układzie SI W (wat). Ponieważ brana jest pod uwagę energia elektryczna, tutaj jest to wartość zużyta energia elektryczna wykonać określoną czynność w określonym czasie.
Jpg?.jpg 600w, https://elquanta.ru/wp-content/uploads/2018/03/risunok-6-120x74..jpg 750w
Wzór na znalezienie energii elektrycznej
Podsumowując, należy zauważyć, że jednostką miary pracy jest wielkość skalarna, ma związek ze wszystkimi działami fizyki i może być rozpatrywana nie tylko od strony elektrodynamiki czy ciepłownictwa, ale także innych działów. W artykule pokrótce omówiono wartość charakteryzującą jednostkę miary pracy siły.
Wideo