Roboty, jak je zrobić. Mały domowy robot. Słynne inteligentne maszyny
Przeczytaj także
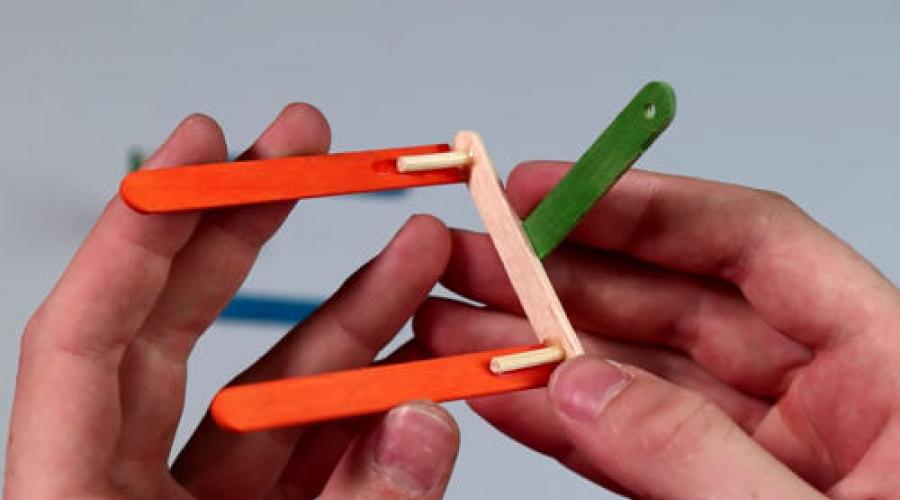
Prowadzący kanał „Textbook of Mastery” wyraźnie pokazał, jak zrobić chodzącego mini robota. Przede wszystkim zróbmy łapy. Łączymy ze sobą dwa patyczki do lodów, odmierzamy 6 centymetrów i od razu umieszczamy dwa znaki w miejscach, w których będą dziury. Nadmiar usuwamy skalpelem, a miejsce cięcia szlifujemy. Za pomocą wiertła wiercimy dwa otwory zgodnie z oznaczeniami.
Bierzemy jeszcze dwa patyki, zabezpieczamy je taśmą, odmierzamy 6 centymetrów i odcinamy piłą do metalu. Nie ma potrzeby zaokrąglania krawędzi. Wykonujemy otwór na ten przedmiot tylko z jednej strony. Przykleimy te puste miejsca na środku półki zaokrąglone kanty. Należy pamiętać, że muszą być one prostopadłe. Przygotuj wcześniej cztery 3-centymetrowe kawałki drewnianych szaszłyków. Włóż do dolnego otworu. Za pomocą superglue przyklej dwa kawałki o długości 8 cm do szpikulca. Za pomocą linijki zachowaj kąt 90 stopni. Zobacz co się dzieje. Drugą łapę wykonujemy dokładnie w ten sam sposób. Jak widać wszystko jasne i aktualne rodowisko domowe nie jest trudno to wszystko zrobić.

Będziemy także potrzebować plastikowej piłki do zabawy. W dolnej części kuli za pomocą piły do metalu wykonujemy dwa wcięcia na drewniany szpikulec. Przekręcamy górną część markerem i zaznaczamy, gdzie zacznie się cięcie. Odkręć go wzdłuż gwintu i zaznacz ponownie. Za pomocą piły do metalu ostrożnie wykonaj nacięcia między znakami. Wybieramy wszystko. Gdy odkręcimy lub dokręcimy kulkę otwór zawsze będzie otwarty.
Bierzemy silnik skrzyni biegów o niskiej prędkości. Dołączamy do niego gotowy kontakt. Możesz sobie poradzić ze zwykłym okablowaniem. Odetnij kawałek nogi od lizaka. Dobrze podgrzewamy jeden koniec i spłaszczamy go. Podgrzewamy również drugi koniec i kładziemy go na wale skrzyni biegów. Na dnie plastikowej kulki odmierz i przyklej kawałek patyczka do lodów. Będzie to stojak na motoreduktor. Pozwól, aby superglue trochę stwardniał i nałóż obficie gorący klej na wierzch. Instalujemy silnik i wypełniamy obudowy gorącym klejem. Nie powinien dostać się na skrzynię biegów. Zostaw piłkę z silnikiem na boku. Wykonujemy 2-centymetrowe półfabrykaty z otworem pośrodku. Aby uniknąć zadziorów, przetwarzamy krawędź papier ścierny. Weź linijkę i wykonaj dwa znaki w odległości 1 cm, wywierć dwa otwory wzdłuż znaków i wytnij je skalpelem półkolem. Przetwarzamy krawędzie.
Ciąg dalszy na wideo od piątej minuty. Tutaj szczegółowo pokazujemy, jak zrobić ciekawego mini robota w domu.
Najprostszy robot w domu
Do zrobienia najprostszej rzeczy potrzebny jest silnik, dwa kawałki drutu, spinacz do bielizny, Ładowarka z telefonu. Najpierw musisz podłączyć przewód do silnika. Następnie, gdy klej stwardnieje, weź szczypce i zegnij nogi. Teraz możesz je rozsunąć, aby robot stał pewniej. Teraz lutujemy styki ładowarki do plusa i minusa.
Następnie film z kanału „No Feelings”, który pokazuje, jak stworzyć zabawkę-robota.
Teraz możesz przetestować tego prostego mini robota. Aby go poruszyć, na rotorze założyliśmy spinacz do bielizny. To wszystko! Robot działa.
Mini robot z zestawu w domu
Kanał Alphadroid powiedział, jak zrobić mini robota w domu.
Do złożenia chodzika potrzebna jest duża liczba elementów. Platforma służyła do samodzielny montaż„Droid”. Oprócz części, które można kupić na rynku radiowym, w zestawie znajdują się dodatkowe niezbędne elementy.
Obejrzyj film z kanału Alpha Mods.
Zawartość zestawu: panele z częściami do montażu obudowy, komora baterii, 4 pełne zestawy serw, 30 nakrętek, śruby i nakrętki M 3, 2 wkręty samogwintujące, ultradźwiękowy czujnik odległości, kabel, śrubokręt namagnesowany, instrukcja montażu.
Korpus robota wykonany jest z drewna, MDF. Zawiera 5 płytek z częściami do korpusu, obrobionymi maszynowo grawer laserowy. Robot wyposażony jest w czujnik ultradźwiękowy, który ułatwi mu poruszanie się w przestrzeni kosmicznej. Na pierwszych stronach instrukcji panele nadwozia narysowane są w skali 1:1. Należy wziąć prawdziwe tablice i ponumerować je, jak pokazano na rysunku.
Przede wszystkim potrzebne są części D1 i D4 oraz para śrub M3*10. Ostrożnie zdejmij części z płyty i skręć je ze sobą. Weź D5 i serwa. Przykręcamy go do D5 za pomocą wkrętów samogwintujących dołączonych do zestawu. Bierzemy pierwszy i drugi blank i łączymy je za pomocą D3. W części drewniane Są rowki i pasują do siebie. Bierzemy orzechy i umieszczamy je w przewidzianych dla nich miejscach. To były nogi i stopy robota. Przejdźmy do D2 i tulei serw. Naprawiamy rękaw na drążku. Pasek jest założony.
Przeprowadzamy kalibrację: obróć napęd w bok, wyciągnij drążek, włóż go ponownie i obracaj ponownie, aż drążek oprze się. Ponownie zdejmujemy paski i ustawiamy je w ostatecznej pozycji: tak, aby D2 stykał się z D3, lub był jak najbliżej niego. Wracamy do napędu pozycja początkowa. W tym momencie kalibracja jest zakończona. Weź wsparcie D10 i zainstaluj je na D1 i D2. D1 nie jest całkowicie zaciśnięty za pomocą przeciwnakrętki. Zamontowano teraz gniazdo na serwa, pozostałe dwa umieszczono na odpowiednich gniazdach. Znajduje się tam drążek mocujący - D11.
Kalibracja: załóż wieszaki i obróć je do końca, zdejmij ramiona i zamontuj je pozycja pionowa, ustaw kąt na 90 stopni i na koniec wykonaj zdjęcie. Nogi są gotowe. Do montażu głowicy: D7, D14 i 4 śruby m3*12 mm.
Zdecydowałem się na płynne przejście do dynamicznych modeli ruchomych. To jest mały projekt domowej roboty robota na sterowanie IR, złożone z prostych i łatwo dostępnych części. Opiera się na dwóch mikrokontrolerach. Zapewniona jest transmisja z pilota PIC12F675, a część odbiorcza sterownika silnika jest zaimplementowana PIC12F629.
Obwód robota na mikrokontrolerze

Z częścią cyfrową wszystko poszło gładko, jedynym problemem był „jednostka napędowa” - małe skrzynie biegów, które są bardzo problematyczne w wykonaniu w domu, więc musiałem rozwinąć pomysł ” wibroroby„Mikrosilniki są sterowane poprzez wzmacniające przełączniki tranzystorowe w BC337. Można je wymienić na dowolne inne małe tranzystory npn przy prądzie kolektora 0,5 A.

Wymiary okazały się bardzo małe - na zdjęciu porównanie z monetą i inną w pobliżu pudełko zapałek. Oczy robota składają się z superjasnych diod LED, umieszczonych w obudowie małych kondensatorów elektrolitycznych.

Omów artykuł MAŁY ROBOT DOMOWY
Zrób robota bardzo prosta Zastanówmy się, do czego to jest potrzebne stworzyć robota w domu, aby zrozumieć podstawy robotyki.
Z pewnością po obejrzeniu wystarczającej liczby filmów o robotach często chciałeś zbudować własnego towarzysza w bitwie, ale nie wiedziałeś, od czego zacząć. Oczywiście nie będzie można zbudować dwunożnego Terminatora, ale nie to staramy się osiągnąć. Każdy, kto wie, jak prawidłowo trzymać lutownicę w rękach, może złożyć prostego robota i nie potrzebuje głęboka wiedza, chociaż nie zaszkodzą. Robotyka amatorska niewiele różni się od projektowania obwodów, jest tylko o wiele bardziej interesująca, ponieważ obejmuje również takie obszary, jak mechanika i programowanie. Wszystkie komponenty są łatwo dostępne i nie są aż tak drogie. Postęp nie stoi więc w miejscu i wykorzystamy go na naszą korzyść.
Wstęp
Więc. Co to jest robot? W większości przypadków to urządzenie automatyczne, który reaguje na wszelkie działania środowisko. Robotami mogą sterować ludzie lub wykonywać wcześniej zaprogramowane czynności. Zazwyczaj robot wyposażony jest w różnorodne czujniki (odległości, kąta obrotu, przyspieszenia), kamery wideo i manipulatory. Część elektroniczna robota składa się z mikrokontrolera (MC) – mikroukładu zawierającego procesor, generator zegara, różne urządzenia peryferyjne, pamięć RAM i pamięć stałą. Na świecie istnieje ogromna liczba różnych mikrokontrolerów różne obszary aplikacji i na ich podstawie można składać potężne roboty. Dla budynki amatorskie szerokie zastosowanie znalazłem mikrokontrolery AVR. Są one zdecydowanie najbardziej dostępne, a w Internecie można znaleźć wiele przykładów opartych na tych MK. Aby pracować z mikrokontrolerami trzeba umieć programować w asemblerze lub C i posiadać podstawowa wiedza w elektronice cyfrowej i analogowej. W naszym projekcie będziemy używać języka C. Programowanie dla MK nie różni się zbytnio od programowania na komputerze, składnia języka jest taka sama, większość funkcji praktycznie nie różni się, a nowe są dość łatwe do nauczenia i wygodne w użyciu.
Czego potrzebujemy
Na początek nasz robot będzie mógł po prostu omijać przeszkody, czyli powtarzać normalne zachowanie większości zwierząt w przyrodzie. Wszystko co potrzebne do zbudowania takiego robota znajdziemy w sklepach radiowych. Zdecydujmy, jak będzie się poruszał nasz robot. Myślę, że najbardziej udane są gąsienice stosowane w czołgach; jest to najwygodniejsze rozwiązanie, ponieważ gąsienice mają większą zwrotność niż koła pojazdu i są wygodniejsze w sterowaniu (aby skręcić, wystarczy obrócić gąsienice). W różne strony). Dlatego będziesz potrzebować dowolnego czołgu z zabawkami, którego gąsienice obracają się niezależnie od siebie, możesz go kupić w dowolnym sklepie z zabawkami za rozsądną cenę. Z tego czołgu potrzebujesz tylko platformy z gąsienicami i silnikami ze skrzyniami biegów, resztę możesz bezpiecznie odkręcić i wyrzucić. Potrzebujemy też mikrokontrolera, mój wybór padł na ATmega16 - ma wystarczającą ilość portów do podłączenia czujników i urządzeń peryferyjnych i ogólnie jest całkiem wygodny. Będziesz także musiał kupić kilka elementów radiowych, lutownicę i multimetr.
Wykonanie planszy za pomocą MK
W naszym przypadku mikrokontroler będzie realizował funkcje mózgu, jednak nie od niego zaczniemy, a od zasilania mózgu robota. Odpowiednie odżywianie- gwarancja zdrowia, więc zaczniemy od tego, jak prawidłowo karmić naszego robota, bo to właśnie tutaj początkujący konstruktorzy robotów najczęściej popełniają błędy. A żeby nasz robot mógł normalnie pracować musimy zastosować stabilizator napięcia. Ja wolę układ L7805 - ma on wytwarzać stabilne napięcie wyjściowe 5 V, czyli to, czego potrzebuje nasz mikrokontroler. Ale ze względu na fakt, że spadek napięcia na tym mikroukładzie wynosi około 2,5 V, należy do niego dostarczyć minimum 7,5 V. Razem z tym stabilizatorem kondensatory elektrolityczne służą do wygładzania tętnień napięcia, a w obwodzie koniecznie znajduje się dioda chroniąca przed odwróceniem polaryzacji.
Teraz możemy przejść do naszego mikrokontrolera. Obudowa MK jest DIP (wygodniej jest lutować) i ma czterdzieści pinów. Na pokładzie znajduje się ADC, PWM, USART i wiele więcej, z których na razie nie będziemy korzystać. Spójrzmy na kilka ważne węzły. Pin RESET (9. noga MK) jest podciągany przez rezystor R1 do „plusa” źródła zasilania - należy to zrobić! W przeciwnym razie Twój MK może przypadkowo zresetować się lub, mówiąc prościej, spowodować usterkę. Innym pożądanym, choć nie obowiązkowym środkiem, jest podłączenie RESETu poprzez kondensator ceramiczny C1 do masy. Na schemacie widać także elektrolit 1000 uF; chroni on przed spadkami napięcia podczas pracy silników, co również będzie miało korzystny wpływ na pracę mikrokontrolera. Rezonator kwarcowy X1 i kondensatory C2, C3 należy umieścić jak najbliżej pinów XTAL1 i XTAL2.
Nie będę mówić o tym, jak flashować MK, ponieważ możesz o tym przeczytać w Internecie. Program napiszemy w C; jako środowisko programistyczne wybrałem CodeVisionAVR. Jest to dość przyjazne dla użytkownika środowisko i jest przydatne dla początkujących, ponieważ posiada wbudowany kreator tworzenia kodu.

Kontrola silnika
Równie ważnym elementem w naszym robocie jest sterownik silnika, dzięki któremu łatwiej nam nim sterować. Nigdy i pod żadnym pozorem nie należy podłączać silników bezpośrednio do MK! Ogólnie rzecz biorąc, potężnymi obciążeniami nie można sterować bezpośrednio z mikrokontrolera, w przeciwnym razie wypali się. Użyj kluczowych tranzystorów. W naszym przypadku jest specjalny chip - L293D. W tak prostych projektach zawsze staraj się używać tego konkretnego chipa z indeksem „D”, ponieważ ma on wbudowane diody zabezpieczające przed przeciążeniem. Ten mikroukład jest bardzo łatwy do kontrolowania i można go łatwo dostać w sklepach radiowych. Dostępny jest w dwóch pakietach: DIP i SOIC. Będziemy używać w Pakiet DIP ze względu na łatwość montażu na płycie. L293D posiada osobne zasilanie silników i logiki. Dlatego sam mikroukład będziemy zasilać ze stabilizatora (wejście VSS), a silniki bezpośrednio z akumulatorów (wejście VS). L293D wytrzymuje obciążenie 600 mA na kanał i ma dwa takie kanały, czyli do jednego chipa można podłączyć dwa silniki. Ale dla pewności połączymy kanały i wtedy będziemy potrzebować po jednej mikrze na każdy silnik. Wynika z tego, że L293D będzie w stanie wytrzymać 1,2 A. Aby to osiągnąć, należy połączyć nogi micry, jak pokazano na schemacie. Mikroukład działa w następujący sposób: po przyłożeniu logicznego „0” do IN1 i IN2, a logicznego do IN3 i IN4, silnik obraca się w jednym kierunku, a jeśli sygnały są odwrócone - stosowane jest logiczne zero, wtedy silnik zacznie się obracać w przeciwnym kierunku. Piny EN1 i EN2 odpowiadają za włączenie każdego kanału. Łączymy je i podłączamy do „plusa” zasilania ze stabilizatora. Ponieważ mikroukład nagrzewa się podczas pracy, a montaż grzejników w tego typu obudowie jest problematyczny, odprowadzanie ciepła zapewniają nogi GND - lepiej je przylutować na szerokiej podkładce stykowej. To wszystko, co musisz wiedzieć o sterownikach silników po raz pierwszy.
Czujniki przeszkód
Aby nasz robot mógł nawigować i nie rozbijać się o wszystko, zainstalujemy dwa czujnik podczerwieni. Najprostszy czujnik składa się z diody IR emitującej widmo podczerwieni oraz fototranzystora, który odbierze sygnał z diody IR. Zasada jest taka: gdy przed czujnikiem nie ma przeszkody, promienie podczerwone nie trafiają w fototranzystor i nie otwiera się on. Jeśli przed czujnikiem znajduje się przeszkoda, wówczas promienie odbijają się od niej i uderzają w tranzystor - otwiera się i zaczyna płynąć prąd. Wadą takich czujników jest to, że mogą różnie reagować różne powierzchnie i nie są chronione przed zakłóceniami - czujnik może przypadkowo zadziałać na skutek obcych sygnałów z innych urządzeń. Modulacja sygnału może uchronić Cię przed zakłóceniami, ale na razie nie będziemy się tym przejmować. Na początek to wystarczy.

Oprogramowanie robota
Aby ożywić robota, trzeba napisać do niego firmware, czyli program, który będzie pobierał odczyty z czujników i sterował silnikami. Mój program jest najprostszy, nie zawiera złożone struktury i każdy zrozumie. Kolejne dwie linijki zawierają pliki nagłówkowe naszego mikrokontrolera oraz polecenia generujące opóźnienia:
#włączać
#włączać
Poniższe linie są warunkowe, ponieważ wartości PORTC zależą od sposobu podłączenia sterownika silnika do mikrokontrolera:
PORTC.0 = 1; PORTC.1 = 0; PORTC.2 = 1; PORTC.3 = 0; Wartość 0xFF oznacza, że wyjście będzie logowane. „1”, a 0x00 to log. „0”. Za pomocą poniższej konstrukcji sprawdzamy, czy przed robotem znajduje się przeszkoda i po której stronie się ona znajduje: if (!(PINB & (1< Jeśli światło z diody IR trafi na fototranzystor, wówczas na nodze mikrokontrolera instalowany jest dziennik. „0” i robot zaczyna się cofać, aby oddalić się od przeszkody, następnie zawraca, aby ponownie nie zderzyć się z przeszkodą, i ponownie porusza się do przodu. Ponieważ mamy dwa czujniki, obecność przeszkody sprawdzamy dwukrotnie – po prawej i po lewej stronie, dzięki czemu możemy dowiedzieć się, po której stronie znajduje się przeszkoda. Polecenie „delay_ms(1000)” wskazuje, że minie jedna sekunda, zanim rozpocznie się wykonywanie następnego polecenia. Omówiłem większość aspektów, które pomogą Ci zbudować pierwszego robota. Ale na tym nie koniec robotyki. Jeśli złożysz tego robota, będziesz miał wiele możliwości jego rozbudowy. Możesz ulepszyć algorytm robota, np. co zrobić, jeśli przeszkoda nie znajduje się z boku, ale tuż przed robotem. Nie zaszkodzi też zainstalować enkoder – proste urządzenie, które pomoże Ci dokładnie ustawić i poznać lokalizację Twojego robota w przestrzeni. Dla przejrzystości można zainstalować kolorowy lub monochromatyczny wyświetlacz, który może wyświetlać przydatne informacje - poziom naładowania akumulatora, odległość do przeszkód, różne informacje dotyczące debugowania. Nie zaszkodzi ulepszyć czujniki - zainstalować TSOP (są to odbiorniki podczerwieni, które odbierają sygnał tylko o określonej częstotliwości) zamiast konwencjonalnych fototranzystorów. Oprócz czujników podczerwieni istnieją czujniki ultradźwiękowe, które są droższe i również mają swoje wady, ale ostatnio zyskują na popularności wśród konstruktorów robotów. Aby robot reagował na dźwięk, dobrym pomysłem byłoby zainstalowanie mikrofonów ze wzmacniaczem. Ale to, co myślę, że jest naprawdę interesujące, to instalacja kamery i zaprogramowanie na jej podstawie widzenia maszynowego. Istnieje zestaw specjalnych bibliotek OpenCV, za pomocą których można zaprogramować rozpoznawanie twarzy, poruszanie się według kolorowych beaconów i wiele innych ciekawych rzeczy. Wszystko zależy tylko od Twojej wyobraźni i umiejętności. Lista komponentów: ATmega16 w obudowie DIP-40> L7805 w pakiecie TO-220 L293D w obudowie DIP-16 x2 szt. rezystory o mocy 0,25 W o wartościach znamionowych: 10 kOhm x 1 szt., 220 Ohm x 4 szt. kondensatory ceramiczne: 0,1 µF, 1 µF, 22 pF kondensatory elektrolityczne: 1000 µF x 16 V, 220 µF x 16 V x 2 szt. dioda 1N4001 lub 1N4004 Rezonator kwarcowy 16 MHz Diody IR: dowolne dwie wystarczą. fototranzystory, także dowolne, ale reagujące tylko na długość fali promieni podczerwonych Kod oprogramowania: W tej chwili mój robot jest prawie ukończony. Wyposażony jest w bezprzewodową kamerę, czujnik odległości (zarówno kamera, jak i ten czujnik są zamontowane na obrotowej wieży), czujnik przeszkód, enkoder, odbiornik sygnału z pilota oraz interfejs RS-232 do podłączenia do komputer. Działa w dwóch trybach: autonomicznym i ręcznym (odbiera sygnały sterujące z pilota), kamerę można także włączać/wyłączać zdalnie lub przez samego robota, oszczędzając energię baterii. Piszę oprogramowanie zabezpieczające mieszkanie (przesyłanie obrazów do komputera, wykrywanie ruchu, spacerowanie po lokalu). Nawet ci, którzy właśnie wzięli do ręki lutownicę, mogą zbudować najprostszego robota. Najczęściej nasz robot (w zależności od konstrukcji) będzie biegł w stronę światła lub wręcz przeciwnie, uciekał przed nim, biegł do przodu w poszukiwaniu promienia światła lub cofał się jak kret. Do naszej przyszłej „sztucznej inteligencji” będziemy potrzebować: Jeśli dodasz do projektu jeszcze kilka jasnych diod LED, możesz łatwo osiągnąć to, że robot będzie po prostu biegał za Twoją ręką, a nawet podążał za jasną lub ciemną linią. Nasza kreacja będzie typowym przedstawicielem robotów klasy BEAM. Zasada zachowania takich robotów opiera się na „fotorecepcji”, co oznacza, że w tym przypadku światło będzie źródłem informacji. Nasz robot posunie się do przodu, gdy trafi w niego wiązka światła. Takie zachowanie urządzenia nazywa się „fotokinezą” – bezkierunkowym wzrostem lub spadkiem mobilności w odpowiedzi na zmiany poziomu oświetlenia. W naszym urządzeniu, jak wspomniano powyżej, jako fotosensor wykorzystano fototranzystor o strukturze n-p-n - PTR-1. Tutaj możesz zastosować nie tylko fototranzystor, ale także fotorezystor lub fotodiodę, ponieważ zasada działania wszystkich elementów jest taka sama. Rysunek od razu pokazuje schemat połączeń robota. Jeśli nie jesteś jeszcze całkiem zaznajomiony z symbolami technicznymi, to na podstawie tego schematu nie będzie trudno zrozumieć zasady oznaczania i łączenia elementów ze sobą. GND.
Przewody łączące poszczególne elementy obwodu z masą (minus zasilacza) zazwyczaj nie są w pełni pokazane na schematach. Zamiast tego rysowana jest mała linia wskazująca połączenie z „uziemieniem”. Czasami obok myślnika piszą „GND” - z angielskiego. słowa „ziemia” - ziemia. Vcc.
To oznaczenie wskazuje, że przez tę część obwód jest podłączony do źródła zasilania - Biegun dodatni! Czasami na diagramach zamiast tych liter często wpisuje się aktualną ocenę. W tym przypadku +5V. Zasada działania robota. Kiedy promień światła pada na fototranzystor (na schemacie jest oznaczony jako PRT1), na wyjściu mikroukładu INPUT1 pojawia się sygnał dodatni, co powoduje pracę silnika M1. I odwrotnie, gdy wiązka światła przestanie oświetlać fototranzystor, sygnał na wyjściu mikroukładu INPUT1 zanika, w związku z czym silnik zatrzymuje się. Rezystor R1 w tym obwodzie ma za zadanie kompensować prąd przepływający przez fototranzystor. Wartość rezystora wynosi 200 Ohm – oczywiście można tu wlutować rezystory o innych wartościach, należy jednak pamiętać, że od tej wartości będzie zależała czułość fototranzystora, a co za tym idzie i wydajność samego robota. Jeśli wartość rezystora będzie duża, robot zareaguje tylko na bardzo jasną wiązkę światła, a jeśli będzie mała, czułość będzie znacznie większa. Krótko mówiąc, w tym obwodzie nie należy stosować rezystorów o rezystancji mniejszej niż 100 omów, w przeciwnym razie fototranzystor może po prostu się przegrzać i ulec awarii. Multimetry cyfrowe i analogowe Wykonywanie pomiarów Obwody odczytu: ekranowanie, uziemienie Obwody odczytu: lamp i fotokomórek Naprawa czajnika elektrycznego Zegar do projekcji obrazu DIYWniosek
