Robotlar ularni qanday qilish kerak. Kichik uy qurilishi robot. Mashhur aqlli mashinalar
Shuningdek o'qing
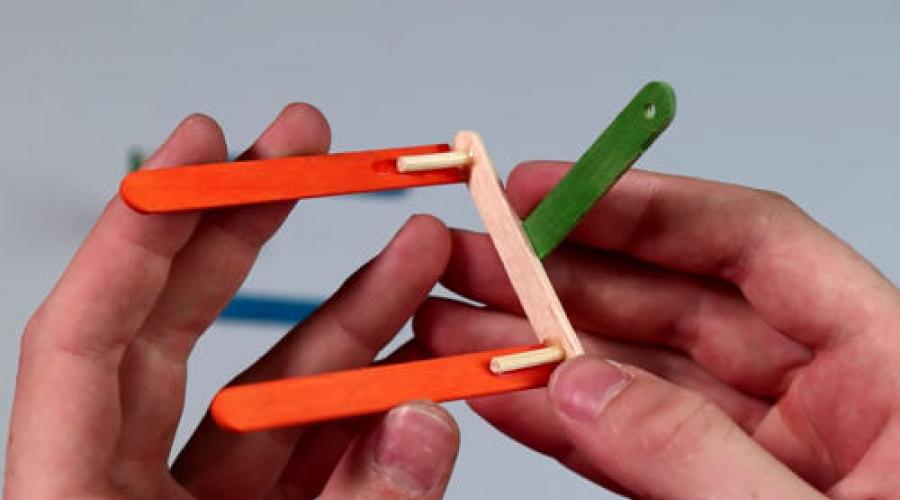
"Mahorat darsligi" kanali boshlovchisi yuradigan mini robotni qanday yasashni aniq ko'rsatdi. Avvalo, panjalarni yasaymiz. Biz ikkita muzqaymoq tayoqchasini bir-biriga mahkamlaymiz, 6 santimetrni o'lchaymiz va darhol teshiklar bo'ladigan ikkita belgi qo'yamiz. Biz barcha ortiqcha narsalarni skalpel bilan olib tashlaymiz va kesilgan joyni qum qilamiz. Matkap yordamida biz belgilarga ko'ra ikkita teshik ochamiz.
Biz yana ikkita tayoq olamiz, ularni lenta bilan mahkamlaymiz, 6 santimetrni o'lchaymiz va ularni arra bilan kesib tashlashning hojati yo'q. Biz bu ish qismi uchun faqat bir tomondan teshik qilamiz. Biz bu blankalarni javonning o'rtasiga yopishtiramiz yumaloq qirralar. E'tibor bering, ular perpendikulyar bo'lishi kerak. Oldindan to'rtta 3 santimetrlik yog'och shishlarni tayyorlang. Pastki teshikka kiriting. Superglue yordamida 90 graduslik burchakni ushlab turish uchun ikkita 8 sm bo'lakni yopishtiring. Nima bo'lishini ko'ring. Biz ikkinchi panjani xuddi shu tarzda qilamiz. Ko'rib turganingizdek, hamma narsa aniq va tushunarli uy muhiti bularning barchasini qilish qiyin emas.

Bizga plastik o'yinchoq to'pi ham kerak bo'ladi. To'pning pastki qismida arra yordamida biz yog'och shish uchun ikkita chuqurchaga chiqamiz. Yuqori qismini marker bilan buramiz va kesish qaerdan boshlanishini belgilaymiz. Uni ip bo'ylab burang va yana belgilang. Temir arra yordamida diqqat bilan belgilar orasidagi kesiklar qiling. Biz hamma narsani tanlaymiz. Biz to'pni burab yoki tortganimizda, teshik har doim ochiq bo'ladi.
Biz past tezlikda vites qutisi motorini olamiz. Biz unga tayyor kontaktni biriktiramiz. Siz oddiy simlar bilan ishlashingiz mumkin. Lolipopdan oyoqning bir qismini kesib oling. Biz bir uchini yaxshilab isitamiz va uni tekislaymiz. Biz ikkinchi uchini ham isitamiz va uni vites qutisi miliga qo'yamiz. Plastik to'pning pastki qismida muzqaymoq tayoqchasini o'lchab, yopishtiring. Bu tishli dvigatel uchun stend bo'ladi. Super elim biroz qotib qolsin va ustiga issiq elim surting. Biz dvigatelni o'rnatamiz va korpuslarni issiq elim bilan to'ldiramiz. U vites qutisiga tushmasligi kerak. To'pni dvigatel bilan bir chetga qo'ying. Biz o'rtada teshik bilan 2 santimetr bo'shliqlar qilamiz. Burrsni oldini olish uchun biz chetini qayta ishlaymiz silliqlash qog'ozi. O'lchagichni oling va 1 sm masofada ikkita belgi qo'ying, belgilar bo'ylab ikkita teshik oching va ularni skalpel bilan yarim doira shaklida kesib oling. Biz qirralarni qayta ishlaymiz.
Beshinchi daqiqadan boshlab videoda davom etadi. Bu erda biz uyda qanday qilib qiziqarli mini robot yasashni batafsil ko'rsatamiz.
Uydagi eng oddiy robot
Eng oddiy narsani qilish uchun bizga dvigatel, ikkita sim, kiyim ipi kerak bo'ladi. quvvatlash qurilmasi telefondan. Avval siz simni dvigatelga ulashingiz kerak. Shundan so'ng, elim qattiqlashgandan so'ng, penseni oling va oyoqlarini egib oling. Endi siz ularni bir-biridan ajratib qo'yishingiz mumkin, shunda robot yanada ishonchli turadi. Endi biz zaryadlovchidagi kontaktlarni ortiqcha va minusga lehimlaymiz.
Keyingi, bu robot o'yinchoqni qanday yaratishni ko'rsatadigan "No Feelings" kanalidagi video.
Endi siz ushbu oddiy mini robotni sinab ko'rishingiz mumkin. Uni harakatga keltirish uchun biz rotorga kiyim pinini qo'yamiz. Ana xolos! Robot ishlayapti.
Uydagi to'plamdan mini robot
Alphadroid kanali uyda mini robotni qanday yasashni aytib berdi.
Yurish moslamasini yig'ish uchun sizga ko'p sonli komponentlar kerak bo'ladi. uchun platforma ishlatilgan o'z-o'zini yig'ish"Droid." Radio bozorida sotib olinadigan qismlarga qo'shimcha ravishda, to'plam qo'shimcha zarur elementlarni o'z ichiga oladi.
Alpha Mods kanalining videosini tomosha qiling.
To'plam tarkibi: korpusni yig'ish uchun qismlarga ega panellar, akkumulyator bo'limi, 4 to'liq servo to'plami, 30 gayka, M 3 vintlar va yong'oqlar, 2 ta o'z-o'zidan tebranish vintlari, ultratovushli masofa sensori, kabel, magnitlangan tornavida, yig'ish bo'yicha ko'rsatmalar.
Robot korpusi yog'ochdan, MDFdan qilingan. Tana uchun qismlarga ega 5 ta plastinani o'z ichiga oladi, ishlov beriladi lazerli o'ymakor. Robot ultratovush sensori bilan jihozlangan, bu unga kosmosda navigatsiya qilishga yordam beradi. Yo'riqnomaning birinchi sahifalarida korpus panellari 1: 1 masshtabida chizilgan. Rasmda ko'rsatilganidek, haqiqiy plitalarni olish va ularni raqamlash kerak.
Avvalo, siz D1 va D4 qismini, shuningdek, bir juft M3 * 10 vintni olishingiz kerak. Ehtiyotkorlik bilan qismlarni plastinkadan olib tashlang va ularni bir-biriga burab qo'ying. D5 va servolarni oling. To'plam bilan birga keladigan o'z-o'zidan tebranish vintlarini ishlatib, uni D5 ga vidalaymiz. Biz birinchi va ikkinchi bo'shliqlarni olamiz va ularni D3 yordamida bog'laymiz. IN yog'och qismlar Oluklar bor va ular bir-biriga mos tushadi. Biz yong'oqlarni olib, ular uchun ajratilgan joylarga joylashtiramiz. Bular robotning oyoqlari va oyoqlari edi. D2 va servo yenglariga o'tish. Biz yengni barga o'rnatamiz. Tasma o'rnatilgan.
Biz kalibrlashni amalga oshiramiz: drayverni yon tomonga burang, barni tortib oling, uni qayta joylashtiring va bar to'xtaguncha yana aylantiring. Yana bir marta biz kayışlarni olib tashlaymiz va ularni oxirgi holatga qo'yamiz: D2 D3 ga tegishi yoki unga iloji boricha yaqinroq bo'lishi uchun. Drayvni ga qaytaramiz boshlang'ich pozitsiyasi. Ushbu nuqtada kalibrlash tugallandi. D10-ni qo'llab-quvvatlang va uni D1 va D2-ga o'rnating. D1 qulflangan gayka yordamida to'liq mahkamlanmagan. Endi o'rnatilgan narsa - bu servolar uchun rozetka, qolgan ikkitasi mos keladigan rozetkalarga joylashtirilgan. Fikslash paneli mavjud - D11.
Kalibrlash: ilgichlarni qo'ying va ularni oxirigacha aylantiring, yelkalarni olib tashlang va ularni o'rnating vertikal holat, burchakni 90 darajaga o'rnating va nihoyat otib tashlang. Oyoqlar tayyor. Boshni yig'ish uchun: D7, D14 va 4 murvat m3 * 12 mm.
Men dinamik harakatlanuvchi modellarga muammosiz o'tishga qaror qildim. Bu kichik loyiha uy qurilishi roboti oddiy va oson mavjud qismlardan yig'ilgan IR boshqaruvida. U ikkita mikrokontrollerga asoslangan. Masofadan boshqarish pultidan uzatish ta'minlanadi PIC12F675, va vosita boshqaruvchisi uchun qabul qiluvchi qism amalga oshiriladi PIC12F629.
Mikrokontrollerdagi robot sxemasi

Raqamli qism bilan hamma narsa muammosiz o'tdi, yagona muammo "qo'zg'alish bloki" da edi - uyda qilish juda muammoli bo'lgan kichik vites qutilari, shuning uchun men bu g'oyani ishlab chiqishga majbur bo'ldim " vibrobuglar"Mikromotorlar BC337 dagi kuchaytirgich tranzistorli kalitlari orqali boshqariladi. Ular boshqa har qanday kichik dvigatel bilan almashtirilishi mumkin. npn tranzistorlari 0,5 A kollektor oqimi bilan.

O'lchamlari juda kichik bo'lib chiqdi - fotosuratda uni tanga va yaqin atrofdagi boshqa narsa bilan taqqoslash mavjud. gugurt qutisi. Robotning ko'zlari kichik elektrolitik kondansatkichlar korpusiga o'rnatilgan o'ta yorqin LEDlardan yasalgan.

Maqolani muhokama qiling KICHIK HOMEY ROBOT
Robot yasang juda oddiy Keling, nima qilish kerakligini aniqlaylik robot yaratish robototexnika asoslarini tushunish uchun uyda.
Shubhasiz, robotlar haqida etarlicha filmlarni tomosha qilganingizdan so'ng, siz tez-tez jangda o'z o'rtoqingizni yaratmoqchi bo'lgansiz, lekin qaerdan boshlashni bilmas edingiz. Albatta, siz ikki oyoqli Terminatorni qura olmaysiz, ammo biz bunga erishmoqchi emasmiz. Qo'lida lehim temirni qanday qilib to'g'ri ushlab turishni biladigan har bir kishi oddiy robotni yig'ishi mumkin va bunga muhtoj emas. chuqur bilim, garchi ular zarar ko'rmasa ham. Havaskor robototexnika sxemalar dizaynidan unchalik farq qilmaydi, faqat juda qiziqroq, chunki u mexanika va dasturlash kabi sohalarni ham o'z ichiga oladi. Barcha komponentlar osongina mavjud va unchalik qimmat emas. Shunday qilib, taraqqiyot bir joyda to'xtamaydi va biz bundan o'z foydamiz uchun foydalanamiz.
Kirish
Shunday qilib. Robot nima? Aksariyat hollarda bu avtomatik qurilma, har qanday harakatlarga javob beradigan muhit. Robotlar odamlar tomonidan boshqarilishi yoki oldindan dasturlashtirilgan harakatlarni bajarishi mumkin. Odatda robot turli sensorlar (masofa, aylanish burchagi, tezlanish), videokameralar va manipulyatorlar bilan jihozlangan. Robotning elektron qismi mikrokontroller (MC) - mikrosxemadan iborat bo'lib, unda protsessor, soat generatori, turli tashqi qurilmalar, operativ xotira va doimiy xotira mavjud. Dunyoda juda ko'p turli xil mikrokontrollerlar mavjud turli hududlar ilovalar va ular asosida siz kuchli robotlarni yig'ishingiz mumkin. Uchun havaskor binolar keng qo'llanilishi AVR mikrokontrolderlari topildi. Ular hozirgacha eng qulay va Internetda ushbu MKlarga asoslangan ko'plab misollarni topishingiz mumkin. Mikrokontrollerlar bilan ishlash uchun siz assembler yoki C-da dasturlash va ega bo'lishingiz kerak asosiy bilim raqamli va analog elektronikada. Loyihamizda biz C dan foydalanamiz. MK uchun dasturlash kompyuterda dasturlashdan unchalik farq qilmaydi, tilning sintaksisi bir xil, aksariyat funktsiyalar deyarli farq qilmaydi va yangilarini o'rganish juda oson va ulardan foydalanish qulay.
Bizga nima kerak
Boshlash uchun, bizning robotimiz oddiygina to'siqlarni chetlab o'tishga qodir bo'ladi, ya'ni tabiatdagi ko'pchilik hayvonlarning odatiy xatti-harakatlarini takrorlaydi. Bunday robotni yaratish uchun kerak bo'lgan hamma narsani radio do'konlarida topish mumkin. Keling, robotimiz qanday harakat qilishini hal qilaylik. Menimcha, eng muvaffaqiyatlisi - bu tanklarda ishlatiladigan izlar, bu eng qulay echim, chunki treklar avtomobil g'ildiraklariga qaraganda ko'proq o'tish qobiliyatiga ega va ularni boshqarish qulayroqdir (burilish uchun bu etarli; treklarni aylantiring turli tomonlar). Shuning uchun, sizga izlari bir-biridan mustaqil ravishda aylanadigan har qanday o'yinchoq tanki kerak bo'ladi, uni har qanday o'yinchoq do'konida o'rtacha narxda sotib olishingiz mumkin. Ushbu tankdan sizga faqat yo'llar va vites qutilari bo'lgan motorlar bo'lgan platforma kerak bo'ladi, qolganlarini xavfsiz tarzda burab, tashlab yuborishingiz mumkin. Bizga mikrokontroller ham kerak, mening tanlovim ATmega16 ga to'g'ri keldi - u sensorlar va tashqi qurilmalarni ulash uchun etarli portlarga ega va umuman olganda bu juda qulay. Bundan tashqari, ba'zi radio komponentlarini, lehim temirini va multimetrni sotib olishingiz kerak bo'ladi.
MK bilan taxta yasash
Bizning holatda, mikrokontroller miyaning funktsiyalarini bajaradi, lekin biz u bilan emas, balki robotning miyasini quvvatlantirish bilan boshlaymiz. To'g'ri ovqatlanish- salomatlik kafolati, shuning uchun biz robotimizni qanday qilib to'g'ri ovqatlantirishimizdan boshlaymiz, chunki bu erda tajribasiz robot quruvchilar odatda xato qilishadi. Va bizning robotimiz normal ishlashi uchun biz kuchlanish stabilizatoridan foydalanishimiz kerak. Men L7805 chipini afzal ko'raman - u barqaror 5V chiqish kuchlanishini ishlab chiqarish uchun mo'ljallangan, bu bizning mikrokontrollerimizga kerak. Ammo ushbu mikrosxemadagi kuchlanishning pasayishi taxminan 2,5 V bo'lganligi sababli, unga kamida 7,5 V kuchlanish berilishi kerak. Ushbu stabilizator bilan birgalikda elektrolitik kondansatkichlar kuchlanish dalgalanmalarini yumshatish uchun ishlatiladi va polaritning teskari o'zgarishidan himoya qilish uchun kontaktlarning zanglashiga diod qo'shilishi kerak.
Endi biz mikrokontrollerimizga o'tishimiz mumkin. MK ning korpusi DIP (lehimlash uchun qulayroq) va qirq pinga ega. Bortda ADC, PWM, USART va boshqa ko'p narsalar mavjud, biz hozircha foydalanmaymiz. Keling, bir nechtasini ko'rib chiqaylik muhim tugunlar. RESET pinini (MK ning 9-oyog'i) R1 rezistori quvvat manbaining "ortiqcha" ga tortadi - buni qilish kerak! Aks holda, sizning MK beixtiyor qayta o'rnatilishi yoki oddiyroq aytganda, nosozlik bo'lishi mumkin. Yana bir kerakli chora, lekin majburiy emas, RESETni C1 seramika kondansatörü orqali erga ulashdir. Diagrammada siz 1000 uF elektrolitni ham ko'rishingiz mumkin, u dvigatellar ishlayotganida sizni kuchlanishning pasayishidan qutqaradi, bu ham mikrokontrollerning ishlashiga foydali ta'sir ko'rsatadi. X1 kvarts rezonatori va C2, C3 kondansatkichlari XTAL1 va XTAL2 pinlariga iloji boricha yaqinroq joylashtirilishi kerak.
MK-ni qanday yoqish haqida gapirmayman, chunki siz bu haqda Internetda o'qishingiz mumkin. Biz dasturni C tilida yozamiz, men dasturlash muhiti sifatida CodeVisionAVR ni tanladim. Bu foydalanuvchi uchun juda qulay muhit va yangi boshlanuvchilar uchun foydalidir, chunki u o'rnatilgan kod yaratish ustasiga ega.

Dvigatelni boshqarish
Bizning robotimizdagi bir xil darajada muhim komponent bu motor drayveri bo'lib, uni boshqarishni osonlashtiradi. Hech qachon va hech qanday holatda motorlar to'g'ridan-to'g'ri MK ga ulanmasligi kerak! Umuman olganda, kuchli yuklarni to'g'ridan-to'g'ri mikrokontrollerdan boshqarish mumkin emas, aks holda u yonib ketadi. Asosiy tranzistorlardan foydalaning. Bizning holatlarimiz uchun maxsus chip mavjud - L293D. Bunday oddiy loyihalarda har doim ushbu maxsus chipni "D" indeksi bilan ishlatishga harakat qiling, chunki u ortiqcha yukdan himoya qilish uchun o'rnatilgan diodlarga ega. Ushbu mikrosxemani boshqarish juda oson va uni radio do'konlarida olish oson. U ikkita paketda mavjud: DIP va SOIC. ichida foydalanamiz DIP to'plami taxtada o'rnatish qulayligi tufayli. L293D dvigatellar va mantiq uchun alohida quvvat manbaiga ega. Shuning uchun biz mikrosxemaning o'zini stabilizatordan (VSS kiritish) va motorlarni to'g'ridan-to'g'ri batareyalardan (VS kiritish) quvvatlaymiz. L293D har bir kanal uchun 600 mA yukga bardosh bera oladi va u ushbu kanallardan ikkitasiga ega, ya'ni ikkita motorni bitta chipga ulash mumkin. Lekin xavfsiz tomonda bo'lish uchun biz kanallarni birlashtiramiz, keyin esa har bir dvigatel uchun bitta mikra kerak bo'ladi. Bundan kelib chiqadiki, L293D 1,2 A ga bardosh bera oladi. Bunga erishish uchun diagrammada ko'rsatilganidek, mikra oyoqlarini birlashtirish kerak. Mikrosxema quyidagicha ishlaydi: IN1 va IN2 uchun mantiqiy "0" va IN3 va IN4 uchun mantiqiy "0" qo'llanilsa, vosita bir yo'nalishda aylanadi va agar signallar teskari bo'lsa - mantiqiy nol qo'llaniladi, keyin vosita boshqa yo'nalishda aylana boshlaydi. EN1 va EN2 pinlari har bir kanalni yoqish uchun javobgardir. Biz ularni bog'laymiz va stabilizatordan quvvat manbaining "ortiqcha" ga ulaymiz. Mikrosxema ish paytida qizib ketganligi sababli va radiatorlarni ushbu turdagi korpusga o'rnatish muammoli bo'lganligi sababli, issiqlikni olib tashlash GND oyoqlari bilan ta'minlanadi - ularni keng kontaktli maydonchada lehimlash yaxshiroqdir. Dvigatel drayverlari haqida birinchi marta bilishingiz kerak bo'lgan hamma narsa shu.
To'siqlar sensorlari
Bizning robotimiz harakatlana olishi va hamma narsaga qulab tushmasligi uchun biz ikkitasini o'rnatamiz infraqizil sensor. Eng oddiy sensor infraqizil spektrda chiqaradigan IR diyotdan va IQ diyotidan signalni qabul qiladigan fototransistordan iborat. Printsip shunday: sensorning oldida hech qanday to'siq bo'lmasa, IQ nurlari fototransistorga tushmaydi va u ochilmaydi. Sensor oldida to'siq bo'lsa, u holda nurlar undan aks etadi va tranzistorga uriladi - u ochiladi va oqim oqib chiqa boshlaydi. Bunday sensorlarning kamchiligi shundaki, ular boshqacha munosabatda bo'lishlari mumkin turli sirtlar va shovqinlardan himoyalanmagan - sensor tasodifan boshqa qurilmalardan begona signallarni ishga tushirishi mumkin. Signalni modulyatsiya qilish sizni shovqinlardan himoya qilishi mumkin, ammo biz hozircha bu bilan bezovta qilmaymiz. Yangi boshlanuvchilar uchun bu etarli.

Robot proshivka
Robotni jonlantirish uchun siz unga proshivka yozishingiz kerak, ya'ni sensorlardan o'qishni oladigan va motorlarni boshqaradigan dastur. Mening dasturim eng oddiy, u o'z ichiga olmaydi murakkab tuzilmalar va hamma buni tushunadi. Keyingi ikkita qatorda mikrokontroller uchun sarlavha fayllari va kechikishlarni yaratish buyruqlari mavjud:
#o'z ichiga oladi
#o'z ichiga oladi
Quyidagi qatorlar shartli, chunki PORTC qiymatlari motor drayverini mikrokontrolleringizga qanday ulaganingizga bog'liq:
PORTC.0 = 1; PORTC.1 = 0; PORTC.2 = 1; PORTC.3 = 0; 0xFF qiymati chiqish jurnal bo'lishini anglatadi. "1" va 0x00 - jurnal. "0". Quyidagi konstruksiya bilan biz robot oldida to‘siq bor yoki yo‘qligini va u qaysi tomonda ekanligini tekshiramiz: agar (!(PINB & (1)).< Agar IQ diodidan yorug'lik fototransistorga tushsa, u holda mikrokontroller oyog'iga log o'rnatiladi. "0" va robot to'siqdan uzoqlashish uchun orqaga qarab harakatlana boshlaydi, keyin to'siq bilan yana to'qnashmaslik uchun ortiga aylanadi va keyin yana oldinga siljiydi. Bizda ikkita sensor borligi sababli, biz ikki marta - o'ngda va chapda to'siq borligini tekshiramiz va shuning uchun biz to'siq qaysi tomonda ekanligini bilib olamiz. "delay_ms(1000)" buyrug'i keyingi buyruq bajarilgunga qadar bir soniya o'tishini bildiradi. Men sizning birinchi robotingizni yaratishga yordam beradigan ko'p jihatlarni ko'rib chiqdim. Ammo robototexnika shu bilan tugamaydi. Agar siz ushbu robotni yig'sangiz, uni kengaytirish uchun juda ko'p imkoniyatlarga ega bo'lasiz. Siz robotning algoritmini yaxshilashingiz mumkin, masalan, to'siq qaysidir tomonda emas, balki robotning to'g'ri oldida bo'lsa, nima qilish kerak. Kodlovchini o'rnatish ham zarar qilmaydi - robotingizni kosmosda aniq joylashtirish va joylashuvini bilishga yordam beradigan oddiy qurilma. Aniqlik uchun foydali ma'lumotlarni ko'rsatishi mumkin bo'lgan rangli yoki monoxrom displeyni o'rnatish mumkin - batareyaning zaryadlash darajasi, to'siqlargacha bo'lgan masofa, turli xil disk raskadrovka ma'lumotlari. Sensorlarni yaxshilash zarar qilmaydi - an'anaviy fototranzistorlar o'rniga TSOP-larni o'rnatish (bular faqat ma'lum chastotadagi signalni qabul qiladigan IR qabul qiluvchilar). Infraqizil sensorlar bilan bir qatorda, ultratovushli sensorlar ham bor, ular qimmatroq va ularning kamchiliklari ham bor, lekin yaqinda robot quruvchilar orasida mashhurlik kasb etmoqda. Robot ovozga javob berishi uchun mikrofonlarni kuchaytirgich bilan o'rnatish yaxshi bo'lar edi. Ammo menimcha, haqiqatan ham qiziq narsa kamerani o'rnatish va unga asoslangan mashina ko'rishni dasturlashdir. Maxsus OpenCV kutubxonalari to'plami mavjud bo'lib, ular yordamida siz yuzni aniqlash, rangli mayoqlar bo'yicha harakatlanish va boshqa ko'plab qiziqarli narsalarni dasturlashingiz mumkin. Bularning barchasi faqat sizning tasavvuringiz va mahoratingizga bog'liq. Komponentlar ro'yxati: DIP-40 paketidagi ATmega16> TO-220 paketidagi L7805 DIP-16 korpusidagi L293D x2 dona. reytinglari bilan 0,25 Vt quvvatga ega rezistorlar: 10 kOhm x 1 dona., 220 Ohm x 4 dona. keramik kondansatkichlar: 0,1 µF, 1 µF, 22 pF elektrolitik kondansatkichlar: 1000 µF x 16 V, 220 µF x 16 V x 2 dona. diod 1N4001 yoki 1N4004 16 MGts chastotali kvarts rezonatori IQ diodlar: ularning har ikkisi bajaradi. fototransistorlar, shuningdek, har qanday, lekin faqat infraqizil nurlarining to'lqin uzunligiga javob beradi Mikrodastur kodi: Ayni paytda mening robotim deyarli tayyor. U simsiz kamera, masofa sensori (kamera ham, bu sensor ham aylanuvchi minoraga o'rnatilgan), to'siq sensori, kodlovchi, masofadan boshqarish pultidagi signal qabul qiluvchisi va RS-232 interfeysi bilan jihozlangan. kompyuter. U ikkita rejimda ishlaydi: avtonom va qo'lda (masofadan boshqarish pultidan boshqaruv signallarini oladi), batareya quvvatini tejash uchun kamerani masofadan turib yoki robotning o'zi ham yoqish/o'chirish mumkin. Men kvartira xavfsizligi uchun dasturiy ta'minotni yozyapman (tasvirlarni kompyuterga o'tkazish, harakatlarni aniqlash, binolarni aylanib chiqish). Hatto lehim dazmolini endigina qo'liga olganlar ham eng oddiy robotni yasashlari mumkin. Ko'pincha bizning robotimiz (konstruktsiyasiga qarab) yorug'lik tomon yuguradi yoki aksincha, undan qochib ketadi, yorug'lik nurini izlab oldinga yuguradi yoki mol kabi orqaga ketadi. Kelajakdagi "sun'iy intellekt" uchun bizga kerak bo'ladi: Agar siz dizaynga yana bir nechta yorqin LED qo'shsangiz, robot sizning qo'lingizdan keyin yugurishi yoki hatto yorug'lik yoki qorong'i chiziq bo'ylab harakatlanishiga osongina erishishingiz mumkin. Bizning yaratganimiz BEAM sinfidagi robotlarning odatiy vakili bo'ladi. Bunday robotlarning xatti-harakati printsipi "fotoqabul qilish" ga asoslanadi, ya'ni yorug'lik bu holda ma'lumot manbai bo'lib xizmat qiladi. Bizning robotimiz unga yorug'lik nuri tushganda oldinga siljiydi. Qurilmaning bunday xatti-harakati "fotokinez" deb ataladi - yorug'lik darajasining o'zgarishiga javoban harakatchanlikning yo'nalishsiz o'sishi yoki pasayishi. Bizning qurilmamizda, yuqorida aytib o'tilganidek, fotosensor sifatida n-p-n strukturasining fototransistori - PTR-1 ishlatilgan. Bu erda siz nafaqat fototransistor, balki fotorezistor yoki fotodioddan ham foydalanishingiz mumkin, chunki barcha elementlarning ishlash printsipi bir xil. Rasmda darhol robotning ulanish sxemasi ko'rsatilgan. Agar siz hali texnik belgilar bilan yaxshi tanish bo'lmasangiz, unda ushbu diagrammaga asoslanib, elementlarni bir-biriga belgilash va ulash tamoyillarini tushunish qiyin bo'lmaydi. GND.
Devrenning turli elementlarini erga ulaydigan simlar (elektr ta'minotining salbiy terminali) odatda diagrammalarda to'liq ko'rsatilmaydi. Buning o'rniga, "tuproq" ga ulanishni ko'rsatadigan kichik chiziq chiziladi. Ba'zan chiziqcha yonida ular ingliz tilidan "GND" deb yozadilar. "er" so'zlari - yer. Vcc.
Ushbu belgi ushbu qism orqali kontaktlarning zanglashiga olib, quvvat manbaiga ulanganligini ko'rsatadi - Ijobiy qutb! Ba'zan diagrammalarda bu harflar o'rniga joriy reyting ko'pincha yoziladi. Bunday holda, +5 V. Robotning ishlash printsipi. Fototransistorga yorug'lik nuri tushganda (diagrammada u PRT1 sifatida ko'rsatilgan), INPUT1 mikrosxemasining chiqishida M1 dvigatelining ishlashiga olib keladigan ijobiy signal paydo bo'ladi. Va aksincha, yorug'lik nuri fototransistorni yoritishni to'xtatganda, INPUT1 mikrosxemasining chiqishidagi signal yo'qoladi, shuning uchun vosita to'xtaydi. Ushbu sxemadagi R1 rezistori fototransistor orqali o'tadigan oqimni qoplash uchun mo'ljallangan. Rezistorning qiymati 200 Ohm - bu erda siz rezistorlarni boshqa qiymatlar bilan lehimlashingiz mumkin, lekin siz fototransistorning sezgirligi va shuning uchun robotning o'zi ishlashi qiymatga bog'liq bo'lishini yodda tutishingiz kerak. Agar qarshilik qiymati katta bo'lsa, robot faqat yorug'likning juda yorqin nuriga javob beradi va agar u kichik bo'lsa, sezgirlik ancha yuqori bo'ladi. Muxtasar qilib aytganda, siz ushbu sxemada 100 Ohm dan kam qarshilikka ega bo'lgan rezistorlarni ishlatmasligingiz kerak, aks holda fototransistor shunchaki qizib ketishi va ishlamay qolishi mumkin. Raqamli va analog multimetrlar O'lchovlarni olish O'qish sxemalari: ekranlash, topraklama O'qish sxemalari: lampalar va fotosellar Elektr choynakni ta'mirlash DIY tasvir proyeksiyalovchi soatXulosa
