Żurawie portowe: wspaniała opowieść o potężnej technologii. Żuraw portalowy i jego rola w pracy portów. Główne typy dźwigów portalowych
Przeczytaj także
Opis suwnicy bramowej
Żuraw składa się z portalu zamontowanego na czterech wózkach jezdnych oraz części obrotowej.
Portal jest dwutorowy o rozstawie 10,5 m lub trzytorowy o rozstawie 15,3 m.
Każdy wózek jezdny będący częścią mechanizmu ruchu żurawia posiada własny napęd. Wózki wyposażone są w obsługiwane ręcznie uchwyty szynowe, które chronią dźwig przed zdmuchnięciem przez wiatr, gdy nie jest on używany.
Część obrotowa żurawia opiera się na górnej części portalu poprzez łożysko obrotowe, w skład którego wchodzą: przegubowy układ wysięgnika solarnego, platforma, rama, kabina maszynowa i kabina sterownicza. Część obrotowa zawiera mechanizmy podnoszenia, obracania i zmiany wysięgu, a także urządzenia i przyrządy zapewniające działanie mechanizmów dźwigu i ich kontrolę.
System bomu składa się z bomu, kufra, odciągu i wahacza z przeciwwagą, połączonych ze sobą przegubowo. Przeciwwaga belki ma za zadanie równoważyć układ wysięgnika. System wysięgnika zapewnia niemal poziomy ruch ładunku przy zmianie zasięgu.
Zmiana wysięgu odbywa się za pomocą mechanizmu zębatkowego, którego napęd znajduje się na górnym wsporniku ramy.
Żuraw obracany jest za pomocą mechanizmu obrotowego zamontowanego na platformie.
Łożysko obrotowe wykonane w formie koła wielorolkowego opartego na okrągłej szynie zamontowanej na głowicy portalu.
Mechanizm podnoszący wykonany jest w postaci dwóch wciągarek jednobębnowych i przystosowany jest do współpracy z chwytakiem i zawieszeniem hakowym.
W trybie hakowym obsługa odbywa się za pomocą dwóch wciągarek i jednej wciągarki. Aby uniknąć przeciążenia, na żurawiu zamontowany jest ogranicznik obciążenia.
Aby ograniczyć podnoszenie ładunku na wysokość, a także ograniczyć zmiany zasięgu i ruchu żurawia, instaluje się wyłączniki krańcowe.
Zestaw urządzeń dźwigowych dostarczanych z dźwigów obejmuje chwytak i zawieszenie hakowe.
Napęd wszystkich mechanizmów jest elektryczny. Żuraw zasilany jest elastycznym kablem z głośników naziemnych. Długość liny pozwala dźwigowi na przesunięcie się 50 m w każdym kierunku od kolumny. Do nawinięcia liny stosuje się bęben kablowy zamontowany na naciągu portalowym.
Sterowanie żurawiem odbywa się przez operatora dźwigu z kabiny sterującej umieszczonej na obrotnicy.
Zestaw dźwigu zawiera części zamienne i narzędzia, których wykaz znajduje się w dokumentacji technicznej dostarczonej z dźwigiem.
Konstrukcja i charakterystyka techniczna dźwigu GANZ oraz jednego z jego mechanizmów
Podstawowe wyposażenie. Dwa silniki elektryczne są zainstalowane na mechanizmach podnoszenia ładunku i zamykania chwytaka, a także na mechanizmie poruszania dźwigiem, po jednym na mechanizmach obrotu i zmiany wysięgnika. Silniki elektryczne „zasilają” się z trójfazowej sieci prądu przemiennego o napięciu 380 V. Obwody sterujące silników elektrycznych „zasilają” prądem przemiennym 110 V przez transformator obniżający napięcie. Silniki elektryczne mechanizmów obrotu i ruchu dźwigu są kołnierzowe: mechanizm obracania jest pionowy, mechanizm ruchu dźwigu jest poziomy.
Hamulce mechanizmów podnoszenia ładunku i zamykania chwytaka posiadają dodatkowy hydrauliczny napęd pedałowy służący do mechanicznego hamowania mechanizmów podczas opuszczania ładunku przy małych prędkościach. Hydrauliczny hamulec obrotu napędzany pedałem jest wyposażony w zatrzask mechaniczny. Pedał hamulca jest połączony z wyłącznikiem, który po naciśnięciu pedału hamulca automatycznie wyłącza silnik elektryczny mechanizmu. Śruba blokująca mechanizmy obracania i zmiany wysięgu wysięgnika służy do ich długotrwałego spowolnienia.
Sterowanie napędami elektrycznymi wszystkich mechanizmów odbywa się za pomocą sterowników magnetycznych. Ponadto, aby zautomatyzować kontrolę pracy wciągarek chwytakowych, na dźwigach instalowane jest urządzenie różnicowe.
Pomocniczy sprzęt elektryczny. Silniki elektryczne wszystkich mechanizmów dźwigowych, z wyjątkiem mechanizmu ruchu, posiadają indywidualne trójfazowe zabezpieczenie przed prądami zwarciowymi – bezpieczniki. Silniki elektryczne mechanizmu ruchu, oprócz ochrony indywidualnej, mają również ochronę ogólną.
Styki maksymalnych przekaźników termicznych są połączone szeregowo z obwodami cewek przekaźników blokujących odpowiednich napędów elektrycznych. Zadziałanie przekaźnika termicznego maksymalnego powoduje wyłączenie odpowiedniego napędu elektrycznego; pozostałe napędy elektryczne żurawia pozostają włączone.
Na mechanizmach podnoszenia ładunku i zamykania chwytaka montowane są wyłączniki krańcowe, zmieniające wysunięcie wysięgnika, ograniczające ruch cięgna i wysuwu wysięgnika w obu kierunkach.
Bęben linowy posiada dwa wyłączniki krańcowe: jeden uruchamiany jest przez przeciwwagę bębna, drugi poprzez naprężenie liny. Dodatkowo na mechanizmie jezdnym dźwigu zamontowane są dwa wyłączniki krańcowe, połączone szeregowo z cewką przekaźnika blokującego mechanizmu jezdnego i rozłączające obwód mocy tego przekaźnika w przypadku zamknięcia uchwytów szynowych.
Gwizdki dzwonka na dźwigu włącza się za pomocą elektrycznego wyłącznika napędu mechanizmu ruchu, a syrenę załącza operator dźwigu z kabiny sterującej. Jeden aparat telefoniczny montowany jest w kabinie sterowniczej i u podnóża portalu.
Ogranicznik obciążenia o konstrukcji dźwigniowo-sprężynowej blokuje mechanizmy podnoszenia i zamykania chwytaka w kierunku podnoszenia, gdy masa podnoszonego ładunku przekracza udźwig znamionowy żurawia o 15%. Granica działania ogranicznika przerywa obwód zasilania cewki przekaźnika zerowych mechanizmów blokujących podnoszenie ładunku i zamykanie chwytaka - ładunek można opuścić.
Na portalu znajdują się cztery lampy o mocy 60 W, przeznaczone do oświetlania ciągów komunikacyjnych, które zasilane są z transformatora obniżającego napięcie. Do oświetlenia torów suwnicy na portalu zamontowane są cztery reflektory z lampami o mocy 500 W i dwoma gniazdami wtykowymi. Na wysięgniku znajduje się reflektor z lampą o mocy 100 W, dwa reflektory pod kabiną operatora dźwigu, trzy lampy w maszynowni i jedna lampa z lampami o mocy 60 W w kabinie sterowniczej. Aby oświetlić przejścia, na obrotowej części dźwigu umieszczono cztery lampy o mocy 60 W.
Elektryczne mechanizmy napędowe do podnoszenia i opuszczania ładunków, zamykania i otwierania chwytaka. Aby ułatwić sterowanie napędami elektrycznymi i pomocniczym wyposażeniem elektrycznym dźwigu, wszystkie urządzenia bezpośredniego sterowania znajdują się w kabinie sterowniczej.
Zasilanie napędów elektrycznych mechanizmów załącza automat główny znajdujący się w kabinie sterowniczej. Obwody sterujące do testowania włącza się specjalnym przyciskiem. Napędy elektryczne mechanizmów podnoszenia ładunku i zamykania chwytaka sterowane są za pomocą sterowników, które mają te same asymetryczne obwody, urządzenie różnicowe i przełącznik nożny do automatycznej pracy chwytaka.
Mechanizm różnicowy, połączony mechanicznie z bębnami wciągarki chwytakowej, przeznaczony jest do: automatycznego włączania silnika mechanizmu podnoszącego do podnoszenia i opuszczania po otwarciu chwytaka w powietrzu; złagodzenie charakterystyki silnika podporowego na końcu operacji czerpania.
Włącznik nożny służy do odłączenia od sieci i zwolnienia silnika mechanizmu podnoszącego podczas nabierania w celu lepszego zagłębienia chwytaka w ładunek.
Podnoszenie i opuszczanie ładunku następuje po ustawieniu uchwytów obu sterowników w skrajnym położeniu; zapewnia to prędkość znamionową. Pośrednie położenia sterowników w kierunku do góry służą do przemieszczania ładunku na krótkie odległości i uzyskania mniejszych prędkości, natomiast w kierunku opuszczania - do uzyskania zwiększonych prędkości i hamowania jednofazowego.
Aby zamknąć chwytak z ładunkiem, stosuje się dwie metody:
· Naciśnięcie pedału przełącznika, a następnie przesunięcie uchwytów obu sterowników do pozycji roboczych. W takim przypadku po zamknięciu chwytak zaczyna automatycznie się podnosić, po czym można zdjąć stopę z pedału.
· Przesuń uchwyt sterownika do pozycji roboczej. W takim przypadku, aby podnieść napełniony chwytak, należy przed jego zamknięciem połączyć rączkę sterownika z rączką innego sterownika.
Mechanizm ruchu dźwigu. Przełącznik sterujący napędem elektrycznym mechanizmu ruchu żurawia ma obwód symetryczny, który działa tak samo w obu kierunkach.
Urządzenie. Mechanizm ruchu suwnicy portalowej stanowią wózki jezdne umieszczone pod każdą nogą portalu. Wózki jezdne połączone są z nogami za pomocą urządzeń wsporczych, które zapewniają ruch żurawia po torach zakrzywionych i jego obrót na tory prostopadłe, a także zwolnienie wózka spod nóg portalu w celu naprawy. Wyważające zawieszenie kół każdego wózka i jego przegubowe połączenie z urządzeniem podtrzymującym służą do równomiernego rozłożenia nacisku na wszystkie koła jezdne i lepszego pokonywania nierówności torów dźwigu.
W dźwigu GANZ mechanizm ruchu składa się z czterech wózków jezdnych, z których dwa są napędzane. Wózki są trójkołowe, wyważone, z zawiasem pionowym.
W wózku napędowym silnik kołnierzowy sprzęgła elastycznego połączony jest z poziomą przekładnią stożkowo-walcową. Mechanizm hamowany jest hamulcem dwublokowym z popychaczem elektrohydraulicznym. Silnik i hamulec zamontowane są na obudowie skrzyni biegów, która osadzona jest na ramie wózka.
Na wózkach napędowych żurawia znajdują się dwa uchwyty szynowe zabezpieczające przed kradzieżą. Główne elementy chwytaka: wrzeciono, wyłącznik krańcowy zamknięcia obwodu sterującego, ogranicznik, klin dystansowy, dźwignia. Chwytaki obsługiwane są ręcznie. Gdy chwytaki są zamknięte, obwód sterujący silnikami elektrycznymi mechanizmu ruchu jest otwarty
Konserwacja. Konserwacja mechanizmu ruchomego dźwigu odbywa się na każdej zmianie, podczas konserwacji-1 sprawdzane są elementy mechanizmu, uchwyty szynowe i bęben linowy, a następnie mechanizm jest testowany w działaniu. Co miesiąc sprawdzane są hamulce, sprzęgła sworzniowe, osie kół jezdnych i wyważarek oraz sworznie chwytów szynowych. Raz na trzy miesiące mechanizm poddawany jest przeglądowi pod kątem uszkodzeń elementów, pęknięć i korozji. Sprawdź szczelność połączeń gwintowych mechanizmu z metalową konstrukcją wózka oraz koron kół zębatych z kołami jezdnymi. Co roku należy sprawdzać zużycie zębów przekładni i przekładni otwartej. Podczas pracy elementy mechanizmu należy smarować ściśle według karty smarowania lub dokumentacji technicznej żurawia.
Portowe suwnice bramowe
Portowe żurawie portalowe mają zwykle udźwig od 3 do 15 tf przy całkowitym ciężarze własnym od 60 do 200 tf i masie najcięższego elementu montażowego od 6 do 30 tf. Udźwig żurawi portalowych do budowy statków waha się od 30 do 75 tf i więcej przy całkowitej masie żurawia 300-700 tf.
Suwnice portalowe montuje się za pomocą wysięgników montażowych, portali lub istniejących w porcie suwnic, a także dużych suwnic pływających. Wysięgniki i portale montażowe stosuje się przede wszystkim w przypadkach, gdy port nie posiada dźwigów portalowych lub pływających o wymaganym udźwigu, a wysięgniki służą do montażu pojedynczych dźwigów, a portale wykorzystywane są głównie do montażu seryjnego. Wysięgnik montażowy stosowany jest w wersji pochyłej, a portal dźwigu podczas montażu porusza się po torach. Udźwig wysięgnika montażowego zwykle nie przekracza 20, rzadziej 30 tf, a zatem nie pozwala na znaczne powiększanie bloków.

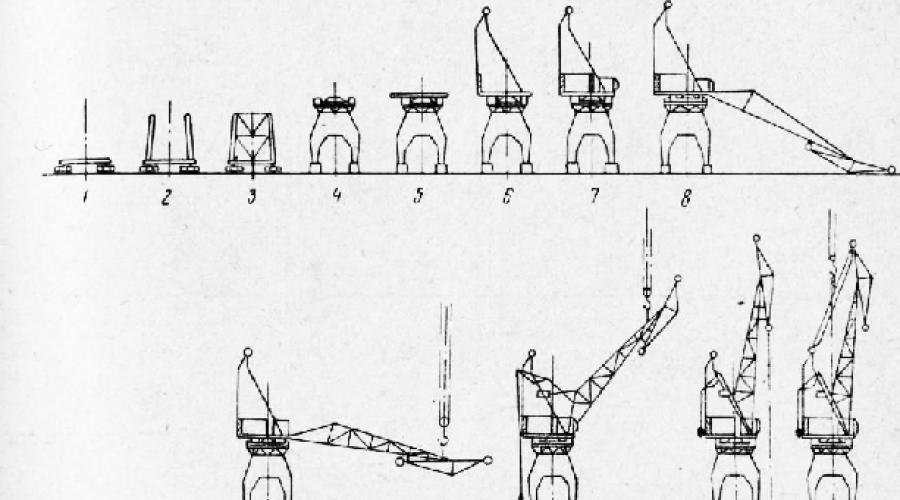
Ryż. 1. Schemat kolejnych operacji montażu suwnicy portalowej na obrotnicy metodą nadbudówki
Na ryc. Na rysunku 1 przedstawiono typową kolejność (pozycje 1-12) montażu żurawia portalowego z kołem obrotowym metodą nadbudówki, realizowaną przy użyciu narzędzi montażowych o ograniczonej nośności. Jak widać na rysunku, tutaj portal składa się z dwóch wstępnie powiększonych ram elewacyjnych (poz. 2) z późniejszym montażem krat (poz. 3), górnej platformy portalu (poz. 4) i ramy obrotowej (poz. 4) pozycja 5). Montaż mechanizmów i ramy (poz. 6-5) na ramie obrotowej odbywa się na znaku projektowym, wysięgnik (poz. 8-11) jest montowany w zespole z pniem, ale bez kratownicy odciągowej. Do czasu, gdy wysięgnik zostanie przymocowany do ramion przeciwwagi, balast tej ostatniej
co najmniej 50% z nich zostało już zrealizowanych. O tym, kiedy zainstalować stałe przeciwwagi części obrotowej (przed czy po zamontowaniu wysięgnika), decyduje się zwykle zgodnie z instrukcjami producenta, w oparciu o warunek zapewnienia stabilności żurawia podczas instalacji. Tutaj o największej wysokości podnoszenia decyduje stan montażu kratownicy (poz. 12), a o największym ciężarze decyduje ciężar obrotnicy dźwigu.
Na ryc. Rysunek 2 przedstawia kolejność montażu 5-tonowego żurawia kolumnowego obrotowego z kołnierzowymi złączami montażowymi.
Ryż. 158 i odzwierciedla połączenie jednej z nóg portalu z belką poprzeczną; Ryż. 2, b - montaż nogi z belką poprzeczną na podwoziu, tymczasowe wzmocnienie ich przekładką i przymocowanie pozostałych trzech nóg do belki poprzecznej; Ryż. 2, c - montaż pierścieniowej głowicy portalu; Ryż. 2, d, montaż dolnej części kolumny obrotowej, zmontowanej w powiększony blok z elementami platformy maszyny; Ryż. 2.5 - montaż górnej części kolumny z napędem mechanizmu zmiany wysięgu; Ryż. 2, e - montaż mechanizmów części obrotowej, kabiny operatora dźwigu i kabiny maszyny; Ryż. 2, g - montaż dźwigni przeciwwagi, montaż przeciwwagi i podnoszenie wysięgnika za pomocą krążka montażowego napędzanego wciągarką dźwigową.

Ryż. 2. Schemat kolejnych operacji montażu suwnicy portalowej na kolumnie obrotowej metodą nadbudówki
Portale instalacyjne o udźwigu do 150 t na wysokości 30-40 m umożliwiają montaż suwnic portalowych dowolnej wielkości w dużych jednostkach. W tych przypadkach (ryc. 159) zarówno prace montażowe, jak i instalacyjne prowadzone są pod portalem montażowym, dlatego portal dźwigu po jego montażu wyjmuje się spod portalu montażowego i wkłada pod niego po podniesieniu części obrotowej w celu montażu ten ostatni.
W przypadku dostępności dużych dźwigów pływających (o udźwigu 100-200 t) żurawie portalowe montuje się na poziomie zerowym za pomocą dźwigów gąsienicowych w dwa lub trzy powiększone bloki, które następnie montuje się za pomocą dźwigu pływającego. Ze względu na wysokie koszty wynajmu dźwigów pływających o dużym udźwigu, są one przywożone na plac budowy jedynie w celu końcowego podniesienia.

Ryż. 3. Schemat montażu suwnicy portalowej z wstępnie powiększonymi blokami
W przypadku wykorzystania do montażu suwnic portalowych istniejących w porcie, najczęściej współpracują one z suwnicami bliźniaczymi, co pozwala na powiększenie jednostek do masy 20-30 g (przy dźwigach 10-15 tonowych).
Prace montażowe na portalu i części obrotowej można wykonywać stosunkowo niezależnie.
Portal jest zazwyczaj montowany bezpośrednio na ścieżce roboczej lub odcinku ścieżki montażowej. W obu przypadkach tor, na którym montowany jest portal, musi spełniać normy tolerancji dla torów dźwigowych, a przede wszystkim pod względem dokładności prowadzenia toru oraz równej wysokości główek szyn pod wózkami portalowymi. Ponieważ ścieżka może zwisać podczas instalacji, jej ślady są okresowo sprawdzane poprzez poziomowanie.
Portal montowany jest bezpośrednio na wózkach jezdnych, które są wstępnie ustawione na torze suwnicy w taki sposób, że wszystkie prawe lub wszystkie lewe kołnierze kół wszystkich wózków są dociskane do szyny. Położenie to jest monitorowane w całym zespole suwnicy w celu utrzymania prawidłowego toru wózków.
Przed ostatecznym połączeniem złączy montażowych portalu sprawdzane są: wymiary toru wzdłuż wózków przednich i tylnych, równość przekątnych portalu na poziomie wózków oraz równość przekątnych wzdłuż jego krawędzi. Dodatkowo sprawdzana jest płaskość górnej krawędzi portalu (jeśli jest złożona z kilku elementów) w miejscu oparcia na niej gramofonu.
Montaż portalu do dźwigów ze stołem obrotowym kończy się montażem bębna obrotnicy (jeżeli jest on wykonany w formie osobnego elementu montażowego). Przy montażu bębna lub stołu obrotowego za pomocą grubościówki umieszczonej na osi środkowej sprawdzane są następujące tolerancje: koncentryczność osi względem pierścienia rozstawczego, wahania wysokości kołnierzy latarni; poprawność obwodu szyny okrągłej – tylko dla szyny stożkowej; płaskość szyny. Ponadto za pomocą suwmiarki sprawdza się nachylenie latarni na złączach bębna.

Ryż. 4. Sprawdzenie montażu bębna obrotnicy dźwigu
W przypadku żurawi na kole obrotowym, po zamontowaniu zespołu części obrotowej lub platformy części obrotowej na portalu, sprawdzane jest łożysko obrotu oraz zazębienie pierścienia z kołem zębatym. W tym celu należy powoli obracać platformę, obserwując opór skrętu, warunki zazębienia (luz boczny) koła zębatego i pierścienia rozstawczego, a także warunki kontaktu kół podporowych z szyną lub rolek z górnymi oponami.
Po zakończeniu montażu dolną część kolumny wkłada się do portalu dźwigu na kolumnie obrotowej i dokonuje się następujących regulacji łożyska obrotowego. W pierwszej kolejności reguluje się położenie poziomych kół nośnych względem szyny pierścieniowej, tak aby uzyskać jak najmniejszą szczelinę pomiędzy nimi a szyną. Jednocześnie, jeśli to możliwe, sprawdzane jest również działanie zazębienia pary koron, ponieważ luz boczny w zazębieniu jest związany z montażem kół.

Ryż. 5. Schematy sprawdzenia montażu podstaw wsporczych (na portalu) kolumny obrotowej dźwigu
Podczas montażu ram części obrotowej żurawi z wysięgnikami przegubowymi monitorowane jest rzeczywiste położenie i względne odkształcenia otworów pod zawiasy układu kinematycznego wysięgnika.
Szczególne miejsce w montażu suwnic bramowych zajmuje montaż wysięgników, a przede wszystkim wysięgników typu przegubowego. Podstawowy schemat montażu takich przedłużeń wysięgnika to schemat pokazany na rys. 6, o. Tutaj zespół wysięgnika z przekładkami pomiędzy jego ogniwami montowany jest na żurawiu w pozycji minimalnego wysięgu, co pozwala na utrzymanie przeciwwagi wysięgnika również w pozycji minimalnego wysięgu. W tym przypadku wymagana jest znaczna wysokość podnoszenia środków montażowych, zapewniająca zawieszenie wysięgnika powyżej jego środka ciężkości.

Ryż. 6. Schematy montażowe wysięgników przegubowych
Jeżeli wysokość podnoszenia osprzętu montażowego jest ograniczona, wysięgnik można zamontować w pozycji maksymalnego wysięgu (rys. 6, b), ale wówczas należy również najpierw podnieść dźwignię przeciwwagi do pozycji maksymalnego wysięgu, co często stwarza pewne trudności. Wysięgnik można zamontować również na żurawiu o wysięgu większym niż maksymalny (rys. 6, c), co wymaga jeszcze mniejszej wysokości podnoszenia i pozwala na utrzymanie przeciwwagi w pozycji minimalnego wysięgu, ale wiąże się z koniecznością stosowania specjalnego wielokrążka P w celu ustawienia wysięgnika w położeniu minimalnego wysięgu.
W przypadkach, gdy udźwig urządzeń montażowych jest niewystarczający do podniesienia wysięgnika w pełnym złożeniu, kratownicę można podnieść oddzielnie, a czasami (szczególnie w przypadku ciężkich wysięgników) wysięgnik podnosi się w trzech etapach (część nasady, góra z pniem i kratownicą). Unika się instalowania bagażnika na wysięgniku zgodnie ze znakiem projektowym, ze względu na trudność tej operacji.
Nie zaleca się podnoszenia wysięgnika za koniec pnia, stosowanego w sytuacji, gdy wysokość podnoszenia narzędzi montażowych jest niewystarczająca, gdyż często prowadzi to do wypadków spowodowanych skręceniem wysięgników.
Ruchy montażowe suwnic portalowych pomiędzy równoległymi torami odbywają się zwykle po tymczasowej prostopadłej trasie, dla której wózki portalowe są obrócone o 90°.
Ruchy pomiędzy torami nierównoległymi, a także obroty portalu względem osi pionowej, realizowane są w wyniku ruchu dźwigu po łukach.

Ryż. 7. Schemat wbudowania czterokołowego wózka dźwigowego w łukową szynę toru montażowego

Ryż. 8. Schemat wpasowania portalu suwnicy w odcinek przejściowy łukowej ścieżki montażowej

Ryż. 9. Żuraw portalowy: 1 - nogi, 2 - wózki jezdne, 3 - rama obrotowa, 4 - zespół portalu górnego, 5 - wysięgnik, 6 - kabina, 7 - odciąg, 8 - rama, 9 - przeciwwaga, 10 - przeciwwaga stała, 11 - stanowisko kontrolne (kabina)
Suwnica bramowa to uniwersalna maszyna do przeładunku przerywanego, posiadająca najczęściej napęd elektryczny zasilany z lądowej sieci elektrycznej. Żuraw portalowy ma swoją nazwę, ponieważ jego podstawa jest wykonana w formie litery. Głównymi elementami portalu są nogi wsparte na wózkach jezdnych, połączone u góry przęsłem. Koła wózków spoczywają na torach dźwigu, po których porusza się dźwig. Wymiary portalu dobrane są tak, aby pomiędzy jego nogami mogły przejeżdżać pociągi. W zależności od ilości torów kolejowych ułożonych pod portalem wyróżnia się portale jednotorowe, dwutorowe i trzytorowe.
Czasami portal zastępuje się półportalem, który ma tylko dwie nogi. Przęsło podparte jest parą wózków jezdnych umieszczonych na szynie ułożonej na ścianie magazynu. Rolki lub rolki ramy obrotowej z przymocowaną do niej ramą obracają się wokół osi pionowej (ballera) zainstalowanej na portalu. Oś ta zapobiega możliwości promieniowego przesunięcia obracającej się części żurawia. Panel sterowania znajduje się po stronie wysięgnika; po przeciwnej stronie do ramy przymocowana jest stała przeciwwaga.
Żuraw portalowy wykonuje następujące ruchy: podnoszenie (opuszczanie) ładunku, zmiana wysięgu wysięgnika, obracanie kolby, przesuwanie portalu po torach żurawia.
Zgodnie z tym żuraw portalowy ma mechanizm podnoszący, mechanizm zmiany wysięgnika, mechanizm wahadłowy i mechanizm ruchu. Mechanizm podnoszący (główny mechanizm dźwigu) nazywany jest również wciągarką podnoszącą i składa się z silnika elektrycznego, skrzyni biegów, bębna ładunkowego, na którym nawinięta jest lina ładunkowa, oraz urządzenia hamującego. Jeśli jest tylko jeden bęben, wciągarkę nazywa się jednobębnową. Wciągarki dwubębnowe, które mogą obracać się jednocześnie lub oddzielnie, są szeroko stosowane, umożliwiając operatorowi dźwigu kontrolowanie chwytaka lub innego osprzętu w celu chwytania ładunku.
Mechanizm obrotowy oraz mechanizm zmiany wysięgu wysięgnika również znajdują się na obrotowej części żurawia. Mechanizmy jezdne są zwykle instalowane w wózkach jezdnych.
Gdy zmienia się zasięg, strzałka porusza się po określonym promieniu, a ładunek porusza się tylko poziomo. Osiąga się to za pomocą różnych specjalnych urządzeń. Na kranie pokazanym na ryc. 9, takim urządzeniem jest wysięgnik przegubowy na końcu bomu i elastyczny odciąg.
Głównymi parametrami żurawi są udźwig, maksymalny promień wysięgnika, prędkość robocza.
Udźwig żurawi jest znormalizowany. W przypadku masowych przeładunków spotykane są dźwigi portalowe o udźwigu 5, 10, 15 T. Dźwigi o udźwigu 5 T wykorzystywane są głównie do przeładunku ładunków głównych. Do przeładunku ciężkich ładunków, sprzętu i ładunków masowych wykorzystuje się dźwigi o udźwigu 10 i 15 ton.
Promień wysięgnika mierzony jest od osi skrętu żurawia, zwykle jego maksymalna wartość wynosi 25-30 m.
Jego wydajność zależy od prędkości pracy żurawia, jednak względy konstrukcyjne zmuszają nas do ograniczenia ich do następujących wartości granicznych: prędkość podnoszenia ładunku 45-80 m/min, prędkość obrotu 1,5-2 obr/min, prędkość zmiany promienia wysięgnika 50-60 m/min, prędkość ruchu portalu 20-30 m/min.
Żurawie o mniejszym udźwigu mają większe prędkości.
DO Kategoria: - Portowe maszyny do podnoszenia i transportu
Suwnica bramowa to sprzęt załadunkowy o dużym udźwigu. Masywna obrotowa konstrukcja jest zainstalowana na portalu poruszającym się po szynach. Technikę tę stosuje się na terenach otwartych, ponieważ jest ciężka i ma duże rozmiary. W zależności od konstrukcji żurawie portalowe mają różne zastosowania.
Korzystanie z suwnic bramowych
Maskus to portal sprzedaży sprzętu, na którym można znaleźć różnorodny sprzęt do prac magazynowych. W katalogu prezentowane są różnorodne urządzenia do transportu kontenerów oraz inne maszyny magazynowe, które pozwalają na zwiększenie efektywności pracy. Za pośrednictwem naszego portalu można kupować i sprzedawać nowe i używane wózki widłowe magazynowe, układarki i kompletatory bez przepracowania i używane.
Cechy portowych suwnic bramowych
Mobilne żurawie portowe służą do transportu kontenerów i innych ciężkich ładunków. Wśród ich funkcji:
- ładowność - 1,5-2 tony;
- zasięg - 15-40 m;
- dostępność sprzętu zastępczego.
Z reguły maszyny o udźwigu przekraczającym 3 tony są wyposażone w haki do ładunków jednostkowych i chwytaki. Chwytaki są używane w ograniczonym zakresie, większość podnośników wyposażona jest jedynie w hak. Nośność zwykle pozostaje stała na wszystkich dystansach lotu.
Wśród nowoczesnych żurawi samojezdnych największą popularnością cieszą się modele uniwersalne, które nadają się do wszelkich prac portowych. Są bardzo wydajne i produktywne, szybko i sprawnie radzą sobie z ciężkimi ładunkami.
Kupno i sprzedaż sprzętu specjalnego
Żurawie portowe to skomplikowany i kosztowny sprzęt, bez którego nie można się obejść podczas pracy w porcie. Różne rodzaje tego sprzętu znajdziesz na portalu Mascus, gdzie dostępne są zarówno nowe, jak i używane wózki widłowe. Oferty od osób prywatnych i firm pomogą Ci znaleźć dokładnie taką opcję, która Ci odpowiada.
Możesz wybrać sprzęt według producenta, kosztu, lokalizacji i innych parametrów. Poruszanie się po szerokim zakresie ułatwi Ci specjalny filtr. Dostawa z innych krajów i całej Rosji realizowana jest przez partnerskie firmy transportowe. Wybierz korzystne oferty zakupu i sprzedaży sprzętu specjalnego na portalu Maskus!
Żurawie portalowe
Żurawie portalowe to najpopularniejszy typ żurawi do układania nawierzchni betonowej stosowany w hydrotechnice do dostarczania wiader z mieszanką betonową z wiaduktu do bloków konstrukcyjnych. Zainstalowane w głównym obszarze mechanizacji, żurawie te służą do wszelkich prac przygotowawczych kompleksu betonowego, a także są wykorzystywane na terenach otwartych do obsługi wielkogabarytowych prac montażowych i przeładunkowych.
Żuraw portalowy to konstrukcja nośna - portal poruszający się po torach kolejowych, na którym zamontowana jest obrotowa część żurawia. Portal stanowi główną różnicę między żurawiami portalowymi a żurawiami innych konstrukcji. Obrotowa część dźwigu jest ujednolicona do montażu na różnych ruchomych konstrukcjach wsporczych (ryc. 31). Portal dźwigowy może obejmować kilka torów kolejowych (portale jedno-, dwu-, trzy- i wielotorowe).
Udźwig żurawi portalowych budowlanych sięga 20/30 g przy wysięgu 50/20 m, co zapewnia podawanie mieszanki betonowej w wiadrach o pojemności 6 m3.
Głębokość opuszczenia haka poniżej główki szyny dźwigu zależy od wysokości betonowego estakady i sięga 70 m lub więcej; wysokość podnoszenia haka nad szyną dźwigu wynosi 36 m.
Żurawie bramowe typu konstrukcyjnego wykonywane są wyłącznie w wersji hakowej. Ich portale mają dużą wysokość, ponieważ wzdłuż wiaduktu można pod nimi transportować kratownice wzmacniające i inne wielkogabarytowe ładunki do celów budowlanych.
Żurawie budowlane charakteryzują się taką samą dużą prędkością podnoszenia jak żurawie przeładunkowe. Jednak ich prędkości skrętu i zmiany wysięgu są nieco mniejsze niż w przypadku przeładunków, co jest konieczne, aby ograniczyć kołysanie się ładunku, który zwykle wisi na długich linach.
Udźwig specjalnych żurawi portalowych sięga 100 ton i osiąga wysokość do 50 m.
Ogólny widok konstrukcyjnego żurawia bramowego pokazano na ryc. 32. Głównymi elementami żurawia są: wysięgnik, rama, rama obrotowa, urządzenie obrotowe, portal, mechanizmy obracania części obrotowej, podnoszenia ładunku i zmiany wysięgu, kabina sterownicza żurawia.
Ruch żurawia realizowany jest za pomocą silników elektrycznych umieszczonych na wózkach napędowych portalu, skąd obrót przekazywany jest na koła za pośrednictwem przekładni. Indywidualny napęd jest łatwy w obsłudze i naprawie oraz nie jest tak wrażliwy na uszkodzenie portalu.

Ryż. 31. Schematy żurawi portalowych:
a - portal; b - półportal; c - na stojaku trójkątnym (pochyłym); g - poruszanie się po portalu; d - chwytak ze zbiornikiem; 1 - lej załadowczy; 2 - przenośniki; 3 - rękawy
Biorąc pod uwagę, że żurawie te w warunkach hydrotechnicznych są zwykle instalowane na wysokich betonowych kozłach, a także mając na uwadze dużą powierzchnię nawietrzną żurawia i ładunku, zwykle przyjmuje się, że liczba kół napędowych żurawia wynosi 50%, a czasami 100% ich całkowitej obecności, co eliminuje ryzyko poślizgu.
Na ryc. 33 przedstawia typowe wózki jezdne żurawi portalowych o udźwigu 3-25 ton, wyprodukowane w zakładzie im. Kirow. Noga suwnicy trzytonowego dźwigu spoczywa bezpośrednio na wózku; w przypadku dźwigów pięciotonowych nacisk nogi portalowej przenoszony jest na ten sam wózek i dodatkowo na trzecie koło; w przypadku żurawi 10- i 15-tonowych noga suwnicy opiera się na wyważarce na wózkach napędowych i jałowych.

Ryż. 32. Żuraw portalowy budowlany: o - z zakrzywionym pniem i elastycznym odciągiem; b - z prostym tułowiem i sztywnym facetem

Ryż. 33. Rodzaje wózków do żurawi portalowych: a - dwukołowe; b i d - trójkołowy; c - czterokołowy; g - ośmiokołowy
Aby zapewnić prawidłowy ruch portalu po ścieżkach, należy przestrzegać następujących zasad:
a) jednoliniowy montaż pasów po każdej stronie portalu i równoległość linii kół obu stron portalu;
b) jednakowość średnic wszystkich kół napędowych;
c) prawidłowy profil koła. Nieprzestrzeganie tych warunków prowadzi do naruszenia geometrii portalu dźwigu i przedwczesnego zużycia mechanizmu jego ruchu.
Żurawie portalowe wyróżniają się przede wszystkim konstrukcją wysięgników, które są najbardziej charakterystycznym elementem decydującym zarówno o konstrukcji żurawi, jak i o ich walorach użytkowych.
Urządzenia wysięgnikowe z reguły mają poziomy ruch ładunku i są wykonane z różnego rodzaju wysięgników prostych lub przegubowych.
Wysięgniki przegubowe z wyważonym mechanizmem zmiany wysięgu zapewniają poziomą trajektorię ruchu ładunku zawieszonego na haku, co jednocześnie stwarza warunki do zrównoważenia ładunku względem samego mechanizmu.
Najczęściej spotykane są bomy przegubowe z poziomym ruchem bloków końcowych, wykonane według jednego z następujących schematów: a) bom z elastycznym wysięgnikiem (patrz ryc. 32, a) i b) bom ze sztywnym wysięgnikiem (patrz rys. 32.6 ).
Podporami wysięgników są dolne zawiasy łączące wysięgniki z ramą obrotową oraz pręty wysięgników łączące wysięgniki z mechanizmami zmiany wysięgu i równoważącymi je przeciwwagami.
Do kontroli i konserwacji bloków końcowych wysięgnika wysięgniki są wyposażone w drabinę z poręczami i platformą.
Wysięgniki dźwigu równoważone są ruchomymi przeciwwagami, które dobiera się tak, aby moment wytworzony przez ich ciężar względem osi obrotu dźwigni, dla wszystkich położeń wysięgników, był równy momentowi na tej samej osi wytworzonemu przez sumę masa wysięgników (bom, wysięgnik i odciąg). Przy takim ułożeniu strzały zawsze znajdują się w stanie obojętnej równowagi, a zmiana ich zasięgu wymaga niewielkiego wysiłku.
Ponieważ gdy zmienia się kąt nachylenia (wydłużenia) wysięgników przegubowych, ładunek porusza się prawie poziomo, podczas wykonywania tej operacji nie jest zużywana dodatkowa energia na podnoszenie ładunku.
Zastosowanie wysięgników przegubowych i wyważonych umożliwia łatwą i bezpieczną zmianę wysięgu żurawia z ładunkiem, wykorzystując ten ruch jako główny ruch roboczy, wraz z ruchami podnoszenia i obracania.
Mechanizmy zmiany wysięgu mają zwykle sztywne połączenie kinematyczne z urządzeniem bomowym, aby wykluczyć samoistne ruchy bomów pod wpływem sił poziomych (wiatr, siły bezwładności, odchylenie lin ładunkowych od pionu itp.).

Ryż. 34. Rodzaje mechanizmów zmiany zasięgu
Na ryc. 34 pokazuje główne typy mechanizmów zmiany zasięgu: zębatka (a) z zębatkami lub zębatkami, śruba (b) z obracającą się nakrętką lub śrubą, hydrauliczna (c), sektor (d), korba sektorowa (e) oraz korbowód (e), w którym silnik krokowy jest połączony bezpośrednio z wysięgnikiem lub wahaczem. Mechanizm zębatkowy jest najprostszym ze wszystkich typów, łatwym w produkcji i jest coraz częściej stosowany.
Część obrotowa żurawia (rys. 35) opiera się na urządzeniu obrotowym w postaci łożysk kołowych, wałeczkowych lub kulkowych z czopem centrującym (kolumną) osadzonym w metalowej konstrukcji portalu. Rama części obrotowej wyposażona jest w wciągarki podnoszące, mechanizmy obrotowe i zmianowe: start, wyposażenie elektryczne oraz kabinę z panelem sterowania.
Mechanizmy obracania żurawi portalowych składają się z obrotowego urządzenia podporowego, które podpiera i centruje część obrotową żurawia oraz napędu obracającego część obrotową.

Ryż. 35. Część obrotowa dźwigu portalowego na obrotnicy:
1 - dźwignia z przeciwwagą wysięgnika; 2 - mechanizm zębatkowy do zmiany zasięgu; 3 - wciągarka; 4 - mechanizm obrotowy
W zależności od rodzaju podpory obrotowej rozróżnia się żurawie z urządzeniem zamontowanym na obrotnicach (zawory kołowe, rolkowe i kulowe) oraz żurawie montowane na kolumnach obrotowych. Mechanizmy obrotowe są zwykle wyposażone w sprzęgła ograniczające moment obrotowy i hamulce sterowane otwarciem. Ostatnio zaczęto stosować także napędy hydrauliczne.
Mechanizmy podnoszące żurawi żurawiowych są bardzo zróżnicowane. Głównymi częściami mechanizmu podnoszącego są urządzenia do przenoszenia ładunku, krążki linowe, wciągarka napędowa, układ sterowania oraz urządzenia sygnalizacyjne i zabezpieczające. Rozmieszczenie i konstrukcja urządzeń podnoszących, wciągarek i innych elementów, a także schemat przeciągania liny zależą od udźwigu, przeznaczenia żurawia i rodzaju jego wysięgnika.
Wszystkie żurawie portalowe są wyposażone w ograniczniki obciążenia i wskaźniki wysięgu wysięgnika.
Żurawie samobieżne portalowe z pełnym obrotem są najczęściej stosowane przy układaniu mieszanek betonowych z estakad betonowych do środkowych i wysokich części konstrukcji. Żurawie te są szczególnie ważne przy łączeniu prac budowlano-montażowych podczas budowy konstrukcji hydraulicznych, gdzie wraz z układaniem betonu wykonywana jest duża ilość prac przy montażu konstrukcji metalowych przedziału rozdzielnicy i osadzonych części agregatów hydraulicznych. Przy właściwym umiejscowieniu suwnic w stosunku do przedziału rozdzielnicy i rur ssawnych wydaje się możliwa obsługa całego obszaru układania mieszanki betonowej i prac instalacyjnych na budynku elektrowni wodnej.
Montaż dźwigu należy przeprowadzić pod okiem doświadczonego specjalisty, zgodnie z wcześniej opracowanym projektem organizacji prac instalacyjnych. Sposób montażu zależy przede wszystkim od dostępnego sprzętu montażowego, jego nośności i wysokości podnoszenia.
Podczas obsługi żurawi portalowych należy zwrócić szczególną uwagę na stan torów kolejowych, przestrzeganie ustalonych zasad podnoszenia ładunków, zapewnienie stabilności żurawia w czasie postoju oraz przestrzeganie przepisów bezpieczeństwa. Podczas obsługi dźwigów obowiązkowy jest system planowych napraw zapobiegawczych i bieżących, regularne przeglądy dźwigów, regulacja i smarowanie poszczególnych podzespołów i części zgodnie z instrukcjami fabrycznymi oraz systematyczne monitorowanie stanu konstrukcji nośnej dźwigu i jego mechanizmów .
Sprawdzenie stateczności żurawia portalowego podnoszącego (lub opuszczającego) maksymalny ładunek przeprowadza się z uwzględnieniem wpływu sił bezwładności i parcia wiatru skierowanego na ładunek z ciśnieniem obliczonym dla stanu pracy żurawia.
Dla żurawia bez ładunku sprawdzenie stateczności przeprowadza się z uwzględnieniem działania wiatru przy obliczonym ciśnieniu dla stanu nieeksploatacyjnego żurawia.
DO kategoria: - Maszty, szewre, portale i żurawie masztowe

Żuraw portalowy to rodzaj sprzętu dźwigowego umieszczonego na portalu. Taki dźwig porusza się po specjalnym sprzęcie szynowym, który znajduje się na wiadukcie lub na nawierzchni drogi. Obecnie suwnice portalowe RHC cieszą się dużą popularnością ze względu na wysoką jakość i przystępną cenę.
Wszystkie żurawie portalowe można podzielić na następujące typy:
Chodniki;
Port;
Żurawie pneumatyczne;
Żurawie montowane na szynach;
Systemy przenośnikowe;
Dok;
Żuraw barkowy;
Żurawie belkowe.
Suwnice pomostowe
Suwnica pomostowa to suwnica nabrzeżna, która charakteryzuje się przęsłem mostowym. Liczba wsporników mostu i konstrukcja będą zależeć od układu nabrzeża i przeznaczenia żurawia. Sam żuraw składa się z podwieszanego wózka towarowego, konstrukcji metalowej, mechanizmu ruchu, chwytaka automatycznego, kabla zasilającego, bębna kablowego, odciągów, chwytaka do długich odcinków, chwytaka i stojaka pionowego. Elementy nośne konstrukcji żurawia, podobnie jak wózki, wykonane są ze stali niskostopowej. Aby wytrzymać zmęczenie i poprawić możliwości produkcyjne, każda rama portalowa jest wykonana ze spawanych belek o przekroju skrzynkowym. Aby zapewnić bezpieczeństwo, na dźwigu znajdują się również urządzenia blokujące.
Żurawie portowe
Nośność takich urządzeń waha się od 1,5-20 ton. Jeśli udźwig przekracza 3 tony, są one wyposażone w wymienne wyposażenie: haki do ładunków jednostkowych i chwytaki do ładunków masowych. W zależności od obsługiwanych statków i szerokości magazynów granicznych przy dźwigach portowych maksymalny wysięg wynosi 15-40 m. Rozstaw portali będzie uzależniony od ilości torów kolejowych, które portal obejmuje.
Żurawie montowane na szynach
Ten typ dźwigu (RMG) to suwnica bramowa kontenerowa. Żuraw porusza się po szynach, jest wyposażony w rozpórkę i może podnosić i układać w stosy 20-40 kontenerów. Żurawie RMG przeznaczone są do prac związanych z przeładunkiem kontenerów. Żurawie takie wyróżniają się napędem elektrycznym, dużą prędkością i dużym udźwigiem. Są bardzo wydajne przy przenoszeniu dużych ilości kontenerów na szyny z drogi. Zastosowanie tego typu urządzeń pozwala na efektywniejsze wykorzystanie całej powierzchni terminala.
Dźwigi pneumatyczne
Urządzenia tego typu służą do pracy w magazynach i wyróżniają się wydajnością. Wyposażone są w komponenty zgodnie z potrzebami klienta. Podstawą niezawodności takich dźwigów jest:
Całkowity brak hydrauliki;
Zastosowanie silników prądu przemiennego;
Napęd elektryczny z regulacją częstotliwości.
Powyższe elementy pomagają ograniczyć prace konserwacyjne.
Żurawie dokowe
Takie żurawie tworzą specjalną grupę. Przeznaczone są do pracy wewnątrz doków i instalowane są na burtach doków pływających. Stabilność konstrukcji zapewniają przeciwwagi, a w razie potrzeby w podpory portalowe wlewany jest beton. Żurawie dokowe są projektowane z uwzględnieniem przegłębienia i przechyłu doku.
Systemy przenośnikowe
Takie systemy zapewniają możliwość transportu niemal każdego ładunku masowego. Charakteryzują się zwiększoną wydajnością, a transport odbywa się pod kątem nachylenia od 0 do 45 stopni, jeśli pracuje jeden napęd. Jeśli działają 2 dyski, kąt jest nieograniczony.
Żurawie belkowe
Takie konstrukcje to urządzenia dźwigowe typu mostowego, które służą do wykonywania operacji podnoszenia, transportu, rozładunku i załadunku w warsztatach przemysłowych, na estakadach dźwigowych i magazynach przedsiębiorstw produkcyjnych. Taki specjalistyczny sprzęt wykorzystywany jest w procesie rozładunku statków rzecznych i morskich, budowy obiektów przemysłowych i cywilnych.