La force élastique du ressort. La loi de Hooke sous forme mathématique

Lire aussi
Instructions
Attachez un dynamomètre au corps et tirez-le, déformant le corps. La force affichée par le dynamomètre sera égale en ampleur à la force élastique agissant sur le corps. Trouvez le coefficient de rigidité à l'aide de Hooke, qui dit que la force élastique est directement proportionnelle à son allongement et est dirigée dans la direction opposée à la déformation. Calculez le coefficient de rigidité en divisant la valeur de la force F par l'allongement du corps x, qui est mesuré avec une règle ou un ruban k=F/x. Pour trouver l’allongement d’un corps déformé, soustrayez la longueur du corps déformé de sa longueur d’origine. Coefficient de rigidité en N/m.
Si vous n'avez pas de dynamomètre, accrochez une charge de masse connue au corps déformable. Assurez-vous que le corps se déforme élastiquement et ne s'effondre pas. Dans ce cas, le poids de la charge sera égal à la force élastique agissant sur la caisse dont il faut trouver par exemple le coefficient de rigidité . Calculer le coefficient de rigidité en divisant le produit de la masse m et de l'accélération chute libre g≈9,81 m/s² pour l'allongement du corps x, k=m g/x. Mesurer l'allongement en utilisant la méthode proposée dans la précédente.
Exemple. Sous une charge de 3 kg, un ressort de 20 cm de long devient 26 cm, déterminez-le. Trouvez d’abord l’extension du ressort dans . Pour ce faire, de la longueur du ressort allongé, soustrayez sa longueur à l'état normal x=26-20=6 cm=0,06 m. Calculez la rigidité en utilisant la formule appropriée k=m g/x=3 9,81/0,06≈500. N/m.
Et maintenant quelques conseils. Réduire rigidité eau dans ton , ajouter distillé ou pur eau de pluie, utilisez des plantes spécialisées telles que l’élodée et la cornée. De plus, l'eau peut être bien congelée ou bouillie. Dans le premier cas, il est versé dans une bassine basse et exposé au froid. Dès qu'elle gèle jusqu'à la moitié du récipient, la glace est brisée et, une fois fondue, utilisée. Dans la seconde, l'eau est bouillie dans un bol en émail pendant une heure, après quoi elle est laissée refroidir et les deux tiers du « dessus » sont utilisés. eau.
Vidéo sur le sujet
Suite à une déformation corps physique Il y a toujours une force qui s’y oppose, essayant de ramener le corps à sa position initiale. Définir ceci forcer élasticité dans le cas le plus simple, cela est possible selon la loi de Hooke.

Instructions
Forcer élasticité, agissant sur un corps déformé, résulte de l'interaction électromagnétique entre ses atomes. Exister différentes sortes déformations : / étirement, cisaillement, flexion. Sous l'influence de forces extérieures, différentes parties du corps bougent différemment, d'où la distorsion et la force. élasticité, qui est dirigé vers l’état précédent.
Déformation de traction/compression par la direction d'une force externe le long de l'axe d'un objet. Il peut s'agir d'une tige, d'un ressort ou d'un autre corps de forme longue. Lorsqu'elle est déformée, la section transversale change et la force élasticité est proportionnel au déplacement mutuel des particules corporelles : Fcontrol = -k ∆x.
C'est ce qu'on appelle la loi de Hooke, mais elle ne s'applique pas toujours, mais uniquement pour des valeurs relativement faibles de ∆x. La valeur k est appelée rigidité et s'exprime en N/m. Ce coefficient dépend de matériel source corps, ainsi que sa forme et sa taille, il est proportionnel à la section transversale.
Lors de la déformation par cisaillement, le volume du corps ne change pas, mais ses couches changent les unes par rapport aux autres. Forcer élasticitéégal au produit du coefficient élasticité avec un décalage qui dépend directement de coupe transversale corps, par l'angle entre l'axe et la tangente dans la direction duquel agit la force extérieure : Fcontrol = D α.
Forces élastiques et déformations
Définition 1
La force qui apparaît dans un corps à la suite de sa déformation et tend à le ramener à son état initial est appelée force élastique.
Tous les corps monde matériel sont soumis à différents types de déformations. Les déformations résultent du mouvement et, par conséquent, des changements de position des particules corporelles les unes par rapport aux autres. Selon le degré de réversibilité on peut distinguer :
- déformations élastiques ou réversibles;
- déformations plastiques (résiduelles) ou irréversibles.
Dans les cas où un corps, à la fin de l'action des forces conduisant à la déformation, restaure ses paramètres d'origine, la déformation est dite élastique.
Il convient de noter que lors de la déformation élastique, l'effet de la force externe sur le corps ne dépasse pas la limite élastique. Ainsi, les forces élastiques compensent l’influence externe sur le corps.
Dans le cas contraire, la déformation est plastique ou résiduelle. Un corps soumis à un impact de cette nature ne retrouve pas sa taille et sa forme d'origine.
Les forces élastiques apparaissant dans les corps ne sont pas capables d'équilibrer complètement les forces provoquant la déformation plastique.
De manière générale, on distingue un certain nombre de déformations simples :
- étirement (compression);
- plier;
- changement;
- torsion.
En règle générale, les déformations sont souvent une combinaison de plusieurs types d'impacts présentés, ce qui permet de réduire l'ensemble des déformations aux deux types les plus courants, à savoir la traction et le cisaillement.
Caractéristiques des forces élastiques
Le module de force élastique agissant par unité de surface est une grandeur physique appelée contrainte (mécanique).
Les contraintes mécaniques, selon la direction d'application de la force, peuvent être :
- normal (dirigé normalement à la surface, $σ$) ;
- tangentiel (dirigé tangent à la surface, $τ$).
Note 1
Le degré de déformation est caractérisé par une mesure quantitative - la déformation relative.
Ainsi, par exemple, le changement relatif de la longueur de la tige peut être décrit par la formule :
$ε=\frac(\Delta l)(l)$,
et relatif tension longitudinale(compression):
$ε'=\frac(\Delta d)(d)$, où :
$l$ est la longueur et $d$ est le diamètre de la tige.
Les déformations $ε$ et $ε’$ se produisent simultanément et ont signes opposés, en raison du fait que lorsqu'il est étiré, le changement de longueur du corps est positif et le changement de diamètre est négatif ; en cas de compression du corps, les signes changent à l'opposé. Leur relation est décrite par la formule :
Ici $μ$ est le coefficient de Poisson, en fonction des propriétés du matériau.
la loi de Hooke
De par leur nature, les forces élastiques sont électromagnétiques et non forces fondamentales, et, par conséquent, ils sont décrits par des formules approximatives.
Ainsi, il a été établi empiriquement que pour de petites déformations, l'allongement relatif et la contrainte sont proportionnels, ou
Ici $E$ est le coefficient de proportionnalité, également appelé module de Young. Il prend une valeur pour laquelle l'allongement relatif est égal à l'unité. Le module d'Young est mesuré en newtons par mètre carré(pascals).
Selon la loi de Hooke, l'allongement d'une tige lors d'une déformation élastique est proportionnel à la force agissant sur la tige, soit :
$F=\frac(ES)(l)\Delta l=k\Delta l$
La valeur $k$ est appelée coefficient d'élasticité.
Déformation solides n'est décrit par la loi de Hooke que jusqu'à la limite de la proportionnalité. Avec l'augmentation de la contrainte, la déformation cesse d'être linéaire, mais jusqu'à ce que la limite élastique soit atteinte, aucune déformation résiduelle ne se produit. Ainsi, la loi de Hooke est valable exclusivement pour les déformations élastiques.
Déformations plastiques
Avec une nouvelle augmentation des forces agissantes, des déformations résiduelles se produisent.
Définition 2
Signification Stress mécanique, à laquelle se produit une déformation résiduelle notable, est appelée limite d'élasticité ($σт$).
De plus, le degré de déformation augmente sans augmenter la contrainte jusqu'à ce que la résistance ultime ($σр$) soit atteinte, lorsque le corps est détruit. Si nous représentons graphiquement le retour du corps à son état d'origine, alors la zone entre les points $σт$ et $σр$ sera appelée la région d'élasticité (région de déformation plastique). En fonction de la taille de cette zone, tous les matériaux sont divisés en matériaux visqueux, dans lesquels la surface élastique est importante, et fragiles, dans lesquels la surface élastique est minime.
Notez que précédemment nous avons considéré l’influence des forces appliquées dans la direction de la normale à la surface. Si forces externes ont été appliqués tangentiellement, une déformation par cisaillement se produit. Dans ce cas, une contrainte tangentielle apparaît en chaque point du corps, déterminée par le module de force par unité de surface, ou :
$τ=\frac(F)(S)$.
Le décalage relatif, à son tour, peut être calculé à l’aide de la formule :
$γ=\frac(1)(G)τ$, où $G$ est le module de cisaillement.
Le module de cisaillement prend la valeur de contrainte tangentielle à laquelle la valeur de cisaillement est égale à l'unité ; $G$ se mesure de la même manière que la tension, en pascals.
La loi de Hooke a été découverte au XVIIe siècle par l'Anglais Robert Hooke. Cette découverte sur l’étirement d’un ressort est l’une des lois de la théorie de l’élasticité et joue un rôle important dans la science et la technologie.
Définition et formule de la loi de Hooke
La formulation de cette loi est la suivante : la force élastique qui apparaît au moment de la déformation d'un corps est proportionnelle à l'allongement du corps et est dirigée à l'opposé du mouvement des particules de ce corps par rapport aux autres particules lors de la déformation.
La notation mathématique de la loi ressemble à ceci :

Riz. 1. Formule de la loi de Hooke
Où Fupr– en conséquence, la force élastique, X– l’allongement du corps (la distance par laquelle la longueur originale du corps change), et k– coefficient de proportionnalité, appelé rigidité du corps. La force se mesure en Newtons et l'allongement d'un corps se mesure en mètres.
Pour révéler la signification physique de la rigidité, vous devez remplacer l'unité dans laquelle l'allongement est mesuré dans la formule de la loi de Hooke - 1 m, après avoir préalablement obtenu une expression pour k.

Riz. 2. Formule de rigidité corporelle
Cette formule montre que la rigidité d'un corps est numériquement égale à la force élastique qui se produit dans le corps (ressort) lorsqu'il est déformé de 1 m. On sait que la rigidité d'un ressort dépend de sa forme, de sa taille et du matériau. à partir duquel le corps est fait.
Force élastique
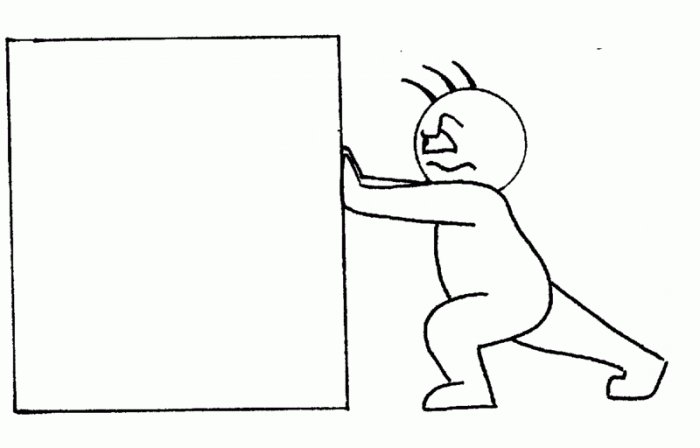
Maintenant que nous savons quelle formule exprime la loi de Hooke, il est nécessaire d’en comprendre la valeur fondamentale. La grandeur principale est la force élastique. Il apparaît à un certain moment où le corps commence à se déformer, par exemple lorsqu'un ressort est comprimé ou étiré. Il est envoyé à verso de la gravité. Lorsque la force élastique et la force de gravité agissant sur le corps deviennent égales, le support et le corps s'arrêtent.
La déformation est un changement irréversible qui se produit dans la taille et la forme du corps. Ils sont associés au mouvement des particules les unes par rapport aux autres. Si une personne s'assoit fauteuil, alors la chaise se déformera, c'est-à-dire que ses caractéristiques changeront. Ça arrive différents types: flexion, étirement, compression, cisaillement, torsion.
Puisque la force élastique est liée à l'origine aux forces électromagnétiques, sachez qu'elle apparaît du fait que les molécules et les atomes - les plus petites particules qui composent tous les corps - s'attirent et se repoussent. Si la distance entre les particules est très petite, elles sont alors affectées par la force répulsive. Si cette distance augmente, alors la force d’attraction agira sur eux. Ainsi, la différence entre les forces attractives et répulsives se manifeste par des forces élastiques.
La force élastique comprend la force de réaction du sol et le poids corporel. La force de la réaction est particulièrement intéressante. C’est la force qui agit sur un corps lorsqu’il est placé sur n’importe quelle surface. Si le corps est suspendu, la force agissant sur lui est appelée force de tension du fil.
Caractéristiques des forces élastiques
Comme nous l'avons déjà découvert, la force élastique apparaît lors de la déformation et vise à restaurer les formes et dimensions d'origine strictement perpendiculaires à la surface déformée. Les forces élastiques présentent également un certain nombre de caractéristiques.
- ils surviennent lors de la déformation ;
- ils apparaissent simultanément dans deux corps déformables ;
- ils sont perpendiculaires à la surface par rapport à laquelle le corps est déformé.
- ils sont dans la direction opposée au déplacement des particules corporelles.
Application de la loi dans la pratique
La loi de Hooke s'applique à la fois aux appareils techniques et de haute technologie, ainsi qu'à la nature elle-même. Par exemple, les forces élastiques se retrouvent dans les mécanismes horlogers, dans les amortisseurs des transports, dans les cordes, les élastiques et même dans les os humains. Le principe de la loi de Hooke est à la base du dynamomètre, un appareil utilisé pour mesurer la force.
Le mot « pouvoir » est si vaste qu’il est presque impossible de lui donner un concept clair. La variété allant de la force musculaire à la force mentale ne couvre pas tout le spectre des concepts qui y sont inclus. La force, considérée comme une grandeur physique, a une signification et une définition clairement définies. La formule de force spécifie un modèle mathématique : la dépendance de la force à l'égard de paramètres de base.
L'histoire de l'étude des forces comprend la détermination de la dépendance aux paramètres et la preuve expérimentale de la dépendance.
Le pouvoir en physique
La force est une mesure de l'interaction des corps. L'action mutuelle des corps les uns sur les autres décrit pleinement les processus associés aux changements de vitesse ou à la déformation des corps.
En tant que grandeur physique, la force a une unité de mesure (dans le système SI - Newton) et un appareil pour la mesurer - un dynamomètre. Le principe de fonctionnement du dynamomètre est basé sur la comparaison de la force agissant sur le corps avec la force élastique du ressort du dynamomètre.
Une force de 1 newton est considérée comme la force sous l'influence de laquelle un corps pesant 1 kg modifie sa vitesse de 1 m en 1 seconde.
Force telle que définie :
- direction d'action;
- point d'application ;
- module, valeur absolue.
Lorsque vous décrivez une interaction, assurez-vous d'indiquer ces paramètres.
Types d'interactions naturelles : gravitationnelles, électromagnétiques, fortes, faibles. gravitationnel gravité universelle avec sa variété - la gravité) existent en raison de l'influence des champs gravitationnels entourant tout corps ayant une masse. L'étude des champs gravitationnels n'est pas encore terminée. Il n'est pas encore possible de trouver la source du champ.
Un plus grand nombre de forces résultent de l'interaction électromagnétique des atomes qui composent la substance.
Force de pression
Lorsqu’un corps interagit avec la Terre, il exerce une pression sur la surface. Dont la force a la forme : P = mg, est déterminée par la masse corporelle (m). L'accélération gravitationnelle (g) a différentes significationsà différentes latitudes de la Terre.
La force de pression verticale est égale en ampleur et en direction opposée à la force élastique apparaissant dans le support. La formule de la force change en fonction du mouvement du corps.
Changement de poids corporel
L’action d’un corps sur un support due à l’interaction avec la Terre est souvent appelée poids corporel. Fait intéressant, le poids corporel dépend de l’accélération du mouvement dans la direction verticale. Dans le cas où la direction de l’accélération est opposée à l’accélération de la gravité, on observe une augmentation du poids. Si l’accélération du corps coïncide avec la direction de la chute libre, alors le poids du corps diminue. Par exemple, étant dans un ascenseur qui monte, au début de la montée, une personne ressent une augmentation de poids pendant un certain temps. Inutile de dire que sa masse change. Dans le même temps, nous séparons les notions de « poids corporel » et de sa « masse ».
Force élastique
Lorsque la forme d'un corps change (sa déformation), une force apparaît qui tend à ramener le corps à sa forme initiale. Cette force a reçu le nom de « force élastique ». Il résulte de l’interaction électrique des particules qui composent le corps.

Considérons la déformation la plus simple : la traction et la compression. L'étirement s'accompagne d'une augmentation dimensions linéaires corps, compression - par leur réduction. La grandeur caractérisant ces processus est appelée allongement du corps. Notons-le "x". La formule de la force élastique est directement liée à l'allongement. Chaque corps en déformation a ses propres caractéristiques géométriques et paramètres physiques. La dépendance de la résistance élastique à la déformation sur les propriétés du corps et du matériau à partir duquel il est fabriqué est déterminée par le coefficient d'élasticité, appelons-le rigidité (k).
Le modèle mathématique de l'interaction élastique est décrit par la loi de Hooke.
La force résultant de la déformation du corps est dirigée contre la direction de déplacement des parties individuelles du corps et est directement proportionnelle à son allongement :
- F y = -kx (en notation vectorielle).
Le signe « - » indique le sens opposé de la déformation et de la force.
Sous forme scalaire, il n’y a pas de signe négatif. La force élastique dont la formule est vue suivante F y = kx, utilisé uniquement pour les déformations élastiques.
Interaction du champ magnétique avec le courant
Influence champ magnétique pour le courant continu est décrite. Dans ce cas, la force avec laquelle le champ magnétique agit sur un conducteur dans lequel est placé du courant est appelée force ampère.
L'interaction du champ magnétique avec provoque la manifestation de la force. La force d'Ampère, dont la formule est F = IBlsinα, dépend de (B), de la longueur de la partie active du conducteur (l), (I) dans le conducteur et de l'angle entre la direction du courant et l'induction magnétique .

Grâce à cette dernière dépendance, on peut affirmer que le vecteur d'action du champ magnétique peut changer lorsque le conducteur tourne ou que la direction du courant change. La règle de la main gauche permet d'établir la direction de l'action. Si main gauche positionné de manière à ce que le vecteur induction magnétique pénètre dans la paume, quatre doigts sont dirigés le long du courant dans le conducteur, puis pliés à 90° pouce montrera la direction d’action du champ magnétique.
L’humanité a trouvé des applications à cet effet, par exemple dans les moteurs électriques. La rotation du rotor est provoquée par le champ magnétique créé par électro-aimant puissant. La formule de force permet de juger de la possibilité de modifier la puissance du moteur. Avec une augmentation du courant ou de l'intensité du champ couple augmente, ce qui entraîne une augmentation de la puissance du moteur.
Trajectoires des particules
L'interaction d'un champ magnétique avec une charge est largement utilisée dans les spectrographes de masse pour l'étude des particules élémentaires.
L'action du champ provoque dans ce cas l'apparition d'une force appelée force de Lorentz. Lorsqu'une particule chargée se déplaçant à une certaine vitesse entre dans un champ magnétique, dont la formule a la forme F = vBqsinα, la particule se déplace en cercle.
Dans ce modèle mathématique, v est le module de vitesse des particules, charge électrique dont - q, B - induction du champ magnétique, α - angle entre les directions de vitesse et d'induction magnétique.

La particule se déplace en cercle (ou arc de cercle), puisque la force et la vitesse sont dirigées selon un angle de 90° l'une par rapport à l'autre. Changer de direction vitesse linéaire provoque une accélération.
La règle de la main gauche, évoquée ci-dessus, s'applique également lors de l'étude de la force de Lorentz : si la main gauche est positionnée de telle manière que le vecteur d'induction magnétique pénètre dans la paume, quatre doigts étendus en ligne sont dirigés le long de la vitesse d'un particule chargée positivement, puis pliée à 90° le pouce indiquera la direction de la force.

Problèmes de plasma
L'interaction d'un champ magnétique et de la matière est utilisée dans les cyclotrons. Les problèmes liés à l'étude du plasma en laboratoire ne permettent pas de le conserver dans des récipients fermés. High ne peut exister que lorsque hautes températures. Le plasma peut être conservé au même endroit dans l’espace grâce à des champs magnétiques, tordant le gaz sous la forme d’un anneau. Les objets contrôlés peuvent également être étudiés en tordant un plasma à haute température en une corde utilisant des champs magnétiques.
Un exemple de l'action d'un champ magnétique dans conditions naturelles sur gaz ionisé - Aurora. Ce spectacle majestueux s'observe au-dessus du cercle polaire arctique à 100 km d'altitude au-dessus de la surface terrestre. La mystérieuse lueur colorée du gaz n’a pu être expliquée qu’au 20e siècle. Le champ magnétique terrestre près des pôles ne peut empêcher la pénétration vent solaire dans l'atmosphère. Le rayonnement le plus actif, dirigé le long des lignes d'induction magnétique, provoque l'ionisation de l'atmosphère.

Phénomènes associés au mouvement des charges
Historiquement, la principale grandeur caractérisant la circulation du courant dans un conducteur est appelée intensité du courant. Il est intéressant de noter que ce concept n’a rien à voir avec la force en physique. L'intensité du courant, dont la formule inclut la charge circulant par unité de temps à travers la section transversale du conducteur, a la forme :
- I = q/t, où t est le temps d'écoulement de la charge q.
En fait, le courant est le montant de la charge. Son unité de mesure est l'Ampère (A), par opposition au N.
Définition du travail de force
La force exercée sur une substance s'accompagne de l'exécution d'un travail. Le travail d'une force est une grandeur physique numériquement égale au produit de la force et du déplacement passé sous son action et le cosinus de l'angle entre les directions de force et de déplacement.
Le travail de force requis, dont la formule est A = FScosα, inclut l'amplitude de la force.
L'action d'un corps s'accompagne d'un changement de vitesse du corps ou d'une déformation, ce qui indique des changements simultanés d'énergie. Le travail effectué par une force dépend directement de sa grandeur.
Forcerélasticité- c'est le pouvoir qui se produit lorsque le corps est déformé et qui cherche à restaurer la forme et la taille antérieures du corps.
La force élastique résulte de l’interaction électromagnétique entre les molécules et les atomes d’une substance.
La version la plus simple de la déformation peut être envisagée à l'aide de l'exemple de la compression et de l'extension d'un ressort.
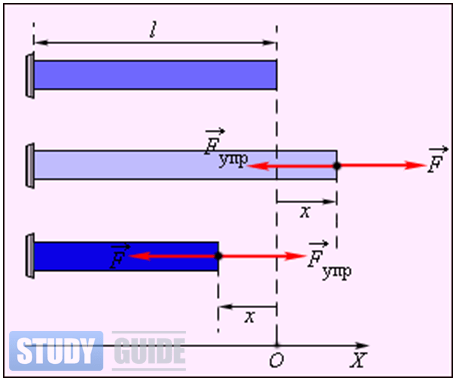
Sur cette photo (x>0) — déformation en traction ; (X< 0) — déformation par compression. (effet) - force externe.
Dans le cas où la déformation est la plus insignifiante, c'est-à-dire petite, la force élastique est dirigée dans la direction opposée à la direction des particules en mouvement du corps et est proportionnelle à la déformation du corps :
Fx = Fcontrôle = - kx
Cette relation est utilisée pour exprimer la loi de Hooke, qui a été établie méthode expérimentale. Coefficient k est communément appelée rigidité corporelle. La rigidité d'un corps se mesure en newtons par mètre (N/m) et dépend de la taille et de la forme du corps, ainsi que des matériaux qui le composent.
En physique, la loi de Hooke pour déterminer la déformation en compression ou en tension d'un corps est écrite sous une forme complètement différente. DANS dans ce cas la déformation relative est appelée

Robert hooke
(18.07.1635 - 03.03.1703)
Naturaliste et encyclopédiste anglais
attitude ε = x/l . Dans le même temps, la contrainte est la surface de la section transversale d'un corps après déformation relative :
σ = F / S = -Fcontrôle / S
Dans ce cas, la loi de Hooke est formulée comme suit : la contrainte σ est proportionnelle à la déformation relative ε . Dans cette formule le coefficient E appelé module de Young. Ce module ne dépend pas de la forme du corps et de ses dimensions, mais en même temps, il dépend directement des propriétés des matériaux qui composent le corps. Pour divers matériaux Le module d'Young fluctue dans une plage assez large. Par exemple, pour le caoutchouc E ≈ 2,106 N/m2 et pour l'acier E ≈ 2,1011 N/m2 (soit cinq ordres de grandeur de plus).
Il est tout à fait possible de généraliser la loi de Hooke dans les cas où surviennent des déformations plus complexes. Par exemple, considérons la déformation par flexion. Considérons une tige qui repose sur deux supports et présente une flèche importante.

Du côté du support (ou de la suspension), une force élastique agit sur ce corps ; c'est la force de réaction du support. La force de réaction du support lorsque les corps entrent en contact sera dirigée strictement perpendiculairement à la surface de contact. Cette force est généralement appelée force de pression normale.
Considérons la deuxième option. La façon dont le corps reste immobile tableau horizontal. Ensuite, la réaction du support équilibre la force de gravité et elle est dirigée verticalement vers le haut. De plus, le poids corporel est considéré comme la force avec laquelle le corps agit sur la table.