Mouvement rectiligne et curviligne. Mouvement linéaire et circulaire
6. Mouvement curviligne. Déplacement angulaire, vitesse angulaire et accélération d'un corps. Trajectoire et déplacement lors du mouvement curviligne d'un corps.
Mouvement curviligne– il s'agit d'un mouvement dont la trajectoire est une ligne courbe (par exemple, un cercle, une ellipse, une hyperbole, une parabole). Un exemple de mouvement curviligne est le mouvement des planètes, l’extrémité d’une aiguille d’horloge le long d’un cadran, etc. En général vitesse en courbe changements d’ampleur et de direction.
Mouvement curviligne d'un point matériel est considéré comme un mouvement uniforme si le module vitesse constant (par exemple, mouvement uniforme dans un cercle) et uniformément accéléré si le module et la direction vitesse changements (par exemple, le mouvement d'un corps projeté selon un angle par rapport à l'horizontale).
Riz. 1.19. Trajectoire et vecteur de mouvement lors d'un mouvement curviligne.
Lorsque vous vous déplacez sur un chemin courbe vecteur de déplacement dirigé le long de la corde (Fig. 1.19), et je- longueur trajectoires . La vitesse instantanée du corps (c'est-à-dire la vitesse du corps en un point donné de la trajectoire) est dirigée tangentiellement au point de la trajectoire où se trouve actuellement le corps en mouvement (Fig. 1.20).
 Riz. 1.20. Vitesse instantanée lors d'un mouvement courbe.
Riz. 1.20. Vitesse instantanée lors d'un mouvement courbe.
Un mouvement curviligne est toujours un mouvement accéléré. C'est accélération lors d'un mouvement courbe est toujours présent, même si le module de vitesse ne change pas, mais seulement le sens de la vitesse. La variation de vitesse par unité de temps est accélération tangentielle :
 ou
ou 
Où v τ ,v 0 – valeurs de vitesse à un moment donné t 0 +Δt Et t 0 respectivement.
Accélération tangentielle en un point donné de la trajectoire, la direction coïncide avec la direction de la vitesse de déplacement du corps ou lui est opposée.
Accélération normale est le changement de vitesse en direction par unité de temps :

Accélération normale dirigé selon le rayon de courbure de la trajectoire (vers l'axe de rotation). L'accélération normale est perpendiculaire à la direction de la vitesse.
Accélération centripète est l'accélération normale lors d'un mouvement circulaire uniforme.
Accélération totale lors d'un mouvement curviligne uniforme d'un corpséquivaut à:

Le mouvement d'un corps le long d'une trajectoire courbe peut être approximativement représenté comme un mouvement le long des arcs de certains cercles (Fig. 1.21).
 Riz. 1.21. Mouvement d'un corps lors d'un mouvement curviligne.
Riz. 1.21. Mouvement d'un corps lors d'un mouvement curviligne.
Mouvement curviligne
Mouvements curvilignes– des mouvements dont les trajectoires ne sont pas des lignes droites, mais des lignes courbes. Les planètes et les eaux des rivières se déplacent le long de trajectoires curvilignes.
Un mouvement curviligne est toujours un mouvement avec accélération, même si la valeur absolue de la vitesse est constante. Un mouvement curviligne avec une accélération constante se produit toujours dans le plan dans lequel se trouvent les vecteurs accélérations et les vitesses initiales du point. Dans le cas d'un mouvement curviligne avec une accélération constante dans le plan xOy projections v X Et v oui sa vitesse sur l'axe Bœuf Et Oy et coordonne X Et oui points à tout moment t déterminé par des formules
![]()
![]()
Un cas particulier de mouvement curviligne est le mouvement circulaire. Le mouvement circulaire, même uniforme, est toujours un mouvement accéléré : le module de vitesse est toujours dirigé tangentiellement à la trajectoire, changeant constamment de direction, donc le mouvement circulaire se produit toujours avec une accélération centripète où r– rayon du cercle.
Le vecteur accélération lors d'un déplacement en cercle est dirigé vers le centre du cercle et perpendiculaire au vecteur vitesse.
Dans un mouvement curviligne, l'accélération peut être représentée comme la somme des composantes normales et tangentielles :
L'accélération normale (centripète) est dirigée vers le centre de courbure de la trajectoire et caractérise le changement de vitesse dans le sens :
v- valeur de vitesse instantanée, r– rayon de courbure de la trajectoire en un point donné.
L'accélération tangentielle (tangentielle) est dirigée tangentiellement à la trajectoire et caractérise le changement de vitesse modulo.
L'accélération totale avec laquelle un point matériel se déplace est égale à :

Outre l’accélération centripète, les caractéristiques les plus importantes du mouvement circulaire uniforme sont la période et la fréquence de révolution.
Période de circulation- c'est le temps qu'il faut au corps pour effectuer une révolution .
La période est indiquée par la lettre T(c) et est déterminé par la formule :
Où t- le temps de circulation, P.- le nombre de tours effectués pendant ce temps.
Fréquence- il s'agit d'une quantité numériquement égale au nombre de tours effectués par unité de temps.
La fréquence est désignée par une lettre grecque (nu) et se trouve à l'aide de la formule :
La fréquence est mesurée en 1/s.
La période et la fréquence sont des quantités mutuellement inverses :
Si un corps se déplace en cercle avec vitesse v, fait un tour, alors la distance parcourue par ce corps peut être trouvée en multipliant la vitesse v pour le temps d'une révolution :
l = vT. Par contre, ce chemin est égal à la circonférence du cercle 2π r. C'est pourquoi
vT = 2π r,
![]()
Où w(s-1) - vitesse angulaire.
À fréquence de rotation constante, l’accélération centripète est directement proportionnelle à la distance entre la particule en mouvement et le centre de rotation.
Vitesse angulaire (w) – une valeur égale au rapport de l'angle de rotation du rayon auquel se trouve le point de rotation à la période de temps pendant laquelle cette rotation s'est produite :
![]() .
.
Relation entre les vitesses linéaires et angulaires :
Le mouvement d’un corps ne peut être considéré comme connu que lorsque l’on sait comment chaque point se déplace. Le mouvement le plus simple des corps solides est la translation. Progressive est le mouvement d'un corps rigide dans lequel toute ligne droite tracée dans ce corps se déplace parallèlement à elle-même.
Selon la forme de la trajectoire, le mouvement peut être divisé en rectiligne et curviligne. Le plus souvent, on rencontre des mouvements curvilignes lorsque la trajectoire est représentée sous forme de courbe. Un exemple de ce type de mouvement est la trajectoire d'un corps projeté incliné par rapport à l'horizon, le mouvement de la Terre autour du Soleil, des planètes, etc.
Image 1 . Trajectoire et mouvement en mouvement courbe
Définition 1Mouvement curviligne appelé mouvement dont la trajectoire est une ligne courbe. Si un corps se déplace le long d'un chemin courbe, alors le vecteur de déplacement s → est dirigé le long de la corde, comme le montre la figure 1, et l est la longueur du chemin. La direction de la vitesse instantanée du corps se déplace le long d'une tangente au même point de la trajectoire où se trouve actuellement l'objet en mouvement, comme le montre la figure 2.

Figure 2. Vitesse instantanée lors d'un mouvement courbe
Définition 2
Mouvement curviligne d'un point matériel appelé uniforme lorsque le module de vitesse est constant (mouvement circulaire), et uniformément accéléré lorsque le module de direction et de vitesse change (mouvement d'un corps lancé).
Le mouvement curviligne est toujours accéléré. Cela s'explique par le fait que même avec un module de vitesse inchangé et une direction modifiée, l'accélération est toujours présente.
Afin d’étudier le mouvement curviligne d’un point matériel, deux méthodes sont utilisées.
Le chemin est divisé en sections distinctes, au niveau de chacune desquelles il peut être considéré comme droit, comme le montre la figure 3.
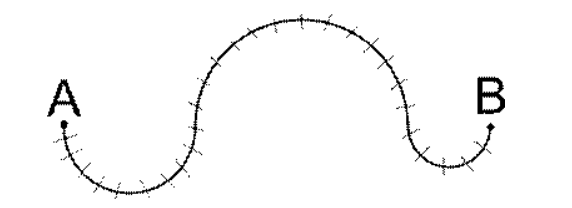
Figure 3. Partitionner le mouvement curviligne en mouvements de translation
Désormais, la loi du mouvement rectiligne peut être appliquée à chaque section. Ce principe est autorisé.
La méthode de résolution la plus pratique est considérée comme représentant le chemin comme un ensemble de plusieurs mouvements le long d’arcs de cercle, comme le montre la figure 4. Le nombre de partitions sera bien moindre que dans la méthode précédente, de plus, le mouvement le long du cercle est déjà curviligne.

Graphique 4. Partitionner un mouvement curviligne en un mouvement le long d'arcs de cercle
Note 1
Pour enregistrer un mouvement curviligne, vous devez être capable de décrire un mouvement dans un cercle et de représenter un mouvement arbitraire sous la forme d'ensembles de mouvements le long des arcs de ces cercles.
L'étude du mouvement curviligne comprend la compilation d'une équation cinématique qui décrit ce mouvement et permet, sur la base des conditions initiales disponibles, de déterminer toutes les caractéristiques du mouvement.
Exemple 1
Étant donné un point matériel se déplaçant le long d’une courbe, comme le montre la figure 4. Les centres des cercles O 1, O 2, O 3 sont situés sur la même droite. Besoin de trouver un déplacement
s → et la longueur du trajet l en se déplaçant du point A au point B.
Solution
Par condition, on a que les centres du cercle appartiennent à la même droite, d'où :
s → = R 1 + 2 R 2 + R 3 .
Puisque la trajectoire du mouvement est la somme de demi-cercles, alors :
l ~ UN B = π R 1 + R 2 + R 3 .
Répondre: s → = R 1 + 2 R 2 + R 3, l ~ A B = π R 1 + R 2 + R 3.
Exemple 2
La dépendance de la distance parcourue par le corps en fonction du temps est donnée, représentée par l'équation s (t) = A + B t + C t 2 + D t 3 (C = 0,1 m/s 2, D = 0,003 m/s 3). Calculez après combien de temps après le début du mouvement l'accélération du corps sera égale à 2 m/s 2
Solution

Réponse : t = 60 s.
Si vous remarquez une erreur dans le texte, veuillez la surligner et appuyer sur Ctrl+Entrée
Mouvement mécanique. Relativité du mouvement mécanique. Système de référence
Le mouvement mécanique s'entend comme un changement dans le temps de la position relative des corps ou de leurs parties dans l'espace : par exemple, le mouvement des corps célestes, les vibrations de la croûte terrestre, les courants aériens et marins, le mouvement des avions et des véhicules, des machines et mécanismes, déformation des éléments structurels et des structures, mouvement des liquides et des gaz, etc.
Relativité du mouvement mécanique
Nous connaissons la relativité du mouvement mécanique depuis l’enfance. Ainsi, assis dans un train et regardant un train, qui se trouvait auparavant sur une voie parallèle, commencer à bouger, nous ne pouvons souvent pas déterminer lequel des trains a réellement commencé à bouger. Et ici, il faut immédiatement clarifier : se déplacer par rapport à quoi ? Concernant la Terre, bien sûr. Parce que nous avons commencé à nous déplacer par rapport au train voisin, quel que soit le train qui commençait son mouvement par rapport à la Terre.
La relativité du mouvement mécanique réside dans la relativité des vitesses de mouvement des corps : les vitesses des corps par rapport à différents systèmes de référence seront différentes (la vitesse d'une personne se déplaçant dans un train, un navire, un avion différera à la fois en ampleur et en direction, selon le référentiel dans lequel ces vitesses sont déterminées : dans le référentiel associé à un véhicule en mouvement, ou à une Terre à l'arrêt).
Les trajectoires des mouvements du corps dans différents systèmes de référence seront également différentes. Par exemple, des gouttes de pluie tombant verticalement sur le sol laisseront une marque sous forme de jets obliques sur la vitre d'un train en marche. De la même manière, tout point de l'hélice en rotation d'un avion en vol ou d'un hélicoptère descendant vers le sol décrit un cercle par rapport à l'avion et une courbe beaucoup plus complexe - une ligne hélicoïdale par rapport à la Terre. Ainsi, avec le mouvement mécanique, la trajectoire du mouvement est également relative.
Le chemin parcouru par le corps dépend aussi du référentiel. Revenant au même passager assis dans le train, on comprend que le chemin parcouru par lui par rapport au train pendant le trajet est égal à zéro (s'il n'a pas bougé autour de la voiture) ou, en tout cas, bien inférieur au chemin il a voyagé avec le train par rapport à la Terre. Ainsi, avec le mouvement mécanique, la trajectoire est également relative.
La prise de conscience de la relativité du mouvement mécanique (c'est-à-dire que le mouvement d'un corps peut être considéré dans différents systèmes de référence) a conduit au passage du système géocentrique du monde de Ptolémée au système héliocentrique de Copernic. Ptolémée, suivant le mouvement du Soleil et des étoiles dans le ciel observé depuis l'Antiquité, a placé la Terre stationnaire au centre de l'Univers avec le reste des corps célestes tournant autour d'elle. Copernic croyait que la Terre et les autres planètes tournaient autour du Soleil et en même temps autour de leurs axes.
Ainsi, un changement de système de référence (la Terre - dans le système géocentrique du monde et le Soleil - dans le système héliocentrique) a conduit à un système héliocentrique beaucoup plus progressif, qui permet de résoudre de nombreux problèmes scientifiques et appliqués de l'astronomie. et changer la vision de l'humanité sur l'Univers.
Le système de coordonnées $X, Y, Z$, le corps de référence auquel il est associé et l'appareil de mesure du temps (horloge) forment un système de référence par rapport auquel le mouvement du corps est considéré.

Organisme de référence appelé le corps par rapport auquel le changement de position des autres corps dans l'espace est considéré.
Le système de référence peut être choisi arbitrairement. Dans les études cinématiques, tous les systèmes de référence sont égaux. Dans les problèmes de dynamique, vous pouvez également utiliser n'importe quel référentiel en mouvement arbitraire, mais les référentiels inertiels sont plus pratiques, car dans eux les caractéristiques du mouvement ont une forme plus simple.
Point matériel
Un point matériel est un objet de taille négligeable qui possède une masse.
Le concept de « point matériel » est introduit pour décrire (à l'aide de formules mathématiques) le mouvement mécanique des corps. Ceci est dû au fait qu'il est plus facile de décrire le mouvement d'un point qu'un corps réel, dont les particules peuvent également se déplacer à des vitesses différentes (par exemple, lors d'une rotation du corps ou de déformations).
Si un corps réel est remplacé par un point matériel, alors la masse de ce corps est attribuée à ce point, mais ses dimensions sont négligées, et en même temps la différence dans les caractéristiques du mouvement de ses points (vitesses, accélérations, etc.), le cas échéant, est négligé. Dans quels cas cela peut-il être fait ?
Presque n'importe quel corps peut être considéré comme un point matériel si les distances parcourues par les points du corps sont très grandes par rapport à sa taille.
Par exemple, la Terre et d’autres planètes sont considérées comme des points matériels lors de l’étude de leur mouvement autour du Soleil. Dans ce cas, les différences dans le mouvement des différents points d'une planète, provoquées par sa rotation quotidienne, n'affectent pas les quantités décrivant le mouvement annuel.
Par conséquent, si dans le mouvement d'un corps étudié on peut négliger sa rotation autour d'un axe, un tel corps peut être représenté comme un point matériel.
Cependant, lors de la résolution de problèmes liés à la rotation quotidienne des planètes (par exemple, lors de la détermination du lever du soleil à différents endroits de la surface du globe), cela n'a aucun sens de considérer une planète comme un point matériel, puisque le résultat du problème dépend de la taille de cette planète et de la vitesse de déplacement des points à sa surface.
Il est légitime de considérer un avion comme un point matériel s'il faut, par exemple, déterminer la vitesse moyenne de son déplacement sur la route de Moscou à Novossibirsk. Mais lors du calcul de la force de résistance de l'air agissant sur un avion en vol, cela ne peut pas être considéré comme un point matériel, puisque la force de résistance dépend de la taille et de la forme de l'avion.
Si un corps se déplace en translation, même si ses dimensions sont comparables aux distances qu'il parcourt, ce corps peut être considéré comme un point matériel (puisque tous les points du corps se déplacent de la même manière).
En conclusion, on peut dire : un corps dont les dimensions peuvent être négligées dans les conditions du problème considéré peut être considéré comme un point matériel.
Trajectoire
Une trajectoire est une ligne (ou, comme on dit, une courbe) qu'un corps décrit lorsqu'il se déplace par rapport à un corps de référence sélectionné.
Il n’est logique de parler de trajectoire que dans le cas où le corps peut être représenté comme un point matériel.
Les trajectoires peuvent avoir différentes formes. Il est parfois possible de juger de la forme d'une trajectoire à la trace visible laissée par un corps en mouvement, par exemple un avion en vol ou un météore traversant le ciel nocturne.
La forme de la trajectoire dépend du choix du corps de référence. Par exemple, par rapport à la Terre, la trajectoire de la Lune est un cercle ; par rapport au Soleil, c'est une ligne de forme plus complexe.

Lors de l’étude du mouvement mécanique, la Terre est généralement considérée comme un corps de référence.
Méthodes pour spécifier la position d'un point et décrire son mouvement
La position d'un point dans l'espace est spécifiée de deux manières : 1) à l'aide de coordonnées ; 2) en utilisant le vecteur rayon.
La position d'un point à l'aide de coordonnées est précisée par trois projections du point $x, y, z$ sur les axes du repère cartésien $OX, OU, OZ$ associé au corps de référence. Pour ce faire, à partir du point A, il faut abaisser les perpendiculaires sur le plan $YZ$ (coordonnée $x$), $ХZ$ (coordonnée $y$), $ХУ$ (coordonnée $z$), respectivement. Il s'écrit ainsi : $A(x, y, z)$. Pour un cas précis, $(x=6, y=10.2, z= 4.5$), le point $A$ est désigné $A(6; 10; 4.5)$.

Au contraire, si des valeurs spécifiques des coordonnées d'un point dans un système de coordonnées donné sont données, alors pour représenter le point lui-même, il est nécessaire de tracer les valeurs des coordonnées sur les axes correspondants ($x$ au $ axe OX$, etc.) et construisons un parallélépipède sur ces trois segments perpendiculaires entre eux. Son sommet, opposé à l'origine des coordonnées $O$ et situé sur la diagonale du parallélépipède, sera le point recherché $A$.
Si un point se déplace dans un certain plan, il suffit alors de tracer deux axes de coordonnées passant par les points sélectionnés sur le corps de référence : $OX$ et $OU$. Ensuite, la position du point sur le plan est déterminée par deux coordonnées $x$ et $y$.

Si un point se déplace le long d'une ligne droite, il suffit de définir un axe de coordonnées OX et de le diriger le long de la ligne de mouvement.
La définition de la position du point $A$ à l'aide du vecteur rayon s'effectue en reliant le point $A$ à l'origine des coordonnées $O$. Le segment orienté $OA = r↖(→)$ est appelé rayon vecteur.
Vecteur de rayon est un vecteur reliant l'origine à la position d'un point à un instant arbitraire.
Un point est spécifié par un rayon vecteur si sa longueur (module) et sa direction dans l'espace sont connues, c'est-à-dire les valeurs de ses projections $r_x, r_y, r_z$ sur les axes de coordonnées $OX, OY, OZ$, ou les angles entre le rayon vecteur et les axes de coordonnées. Pour le cas du mouvement sur un plan on a :
Ici $r=|r↖(→)|$ est le module du rayon vecteur $r↖(→), r_x$ et $r_y$ sont ses projections sur les axes de coordonnées, les trois quantités sont des scalaires ; xzhu - coordonnées du point A.
Les dernières équations démontrent le lien entre les méthodes coordonnées et vectorielles pour spécifier la position d'un point.
Le vecteur $r↖(→)$ peut également être décomposé en composantes le long des axes $X$ et $Y$, c'est-à-dire représenté comme la somme de deux vecteurs :
$r↖(→)=r↖(→)_x+r↖(→)_y$
Ainsi, la position d'un point dans l'espace est précisée soit par ses coordonnées, soit par le rayon vecteur.
Façons de décrire le mouvement d'un point
Conformément aux méthodes de spécification des coordonnées, le mouvement d'un point peut être décrit : 1) par la méthode des coordonnées ; 2) méthode vectorielle.
Avec la méthode des coordonnées pour décrire (ou spécifier) le mouvement, la variation des coordonnées d'un point au fil du temps s'écrit sous la forme de fonctions de ses trois coordonnées en fonction du temps :
Les équations sont appelées équations cinématiques du mouvement d'un point, écrites sous forme de coordonnées. Connaissant les équations cinématiques du mouvement et les conditions initiales (c'est-à-dire la position du point au moment initial), vous pouvez déterminer la position du point à tout moment.
Avec la méthode vectorielle de description du mouvement d'un point, l'évolution de sa position dans le temps est donnée par la dépendance du rayon vecteur au temps :
$r↖(→)=r↖(→)(t)$
L'équation est l'équation du mouvement d'un point, écrite sous forme vectorielle. Si cela est connu, alors à tout moment, il est possible de calculer le rayon vecteur du point, c'est-à-dire de déterminer sa position (comme dans le cas de la méthode des coordonnées). Ainsi, spécifier trois équations scalaires équivaut à spécifier une équation vectorielle.
Pour chaque cas de mouvement, la forme des équations sera bien spécifique. Si la trajectoire du mouvement d’un point est une ligne droite, le mouvement est dit rectiligne, et s’il s’agit d’une courbe, il est dit curviligne.
Mouvement et chemin
Le déplacement en mécanique est un vecteur reliant les positions d'un point en mouvement au début et à la fin d'une certaine période de temps.
Le concept de vecteur de déplacement est introduit pour résoudre le problème de la cinématique - pour déterminer la position d'un corps (point) dans l'espace à un instant donné, si sa position initiale est connue.
En figue. le vecteur $(М_1М_2)↖(-)$ relie deux positions d'un point en mouvement - $М_1$ et $М_2$ à des instants $t_1$ et $t_2$ respectivement et, selon la définition, est un vecteur de déplacement. Si le point $M_1$ est spécifié par le rayon vecteur $r↖(→)_1$, et le point $M_2$ est spécifié par le rayon vecteur $r↖(→)_2$, alors, comme le montre la figure, le vecteur déplacement est égal à la différence de ces deux vecteurs, c'est-à-dire la variation du vecteur rayon dans le temps $∆t=t_2-t_1$ :
$∆r↖(→)=r↖(→)_2-r↖(→)_1$.
L'addition des déplacements (par exemple, sur deux sections adjacentes de la trajectoire) $∆r↖(→)_1$ et $∆r↖(→)_2$ s'effectue selon la règle d'addition vectorielle :
$∆r=∆r↖(→)_2+∆r↖(→)_1$
Le chemin est la longueur de la section de trajectoire parcourue par un point matériel dans un laps de temps donné. L'amplitude du vecteur déplacement dans le cas général n'est pas égale à la longueur du chemin parcouru par le point pendant le temps $∆t$ (la trajectoire peut être curviligne, et, de plus, le point peut changer la direction du mouvement ).
L'amplitude du vecteur déplacement est égale à la trajectoire uniquement pour un mouvement rectiligne dans une direction. Si la direction du mouvement linéaire change, l’amplitude du vecteur déplacement est inférieure à la trajectoire.
Lors d'un mouvement curviligne, l'amplitude du vecteur déplacement est également inférieure à la trajectoire, puisque la corde est toujours inférieure à la longueur de l'arc qu'elle sous-tend.

Vitesse d'un point matériel
La vitesse caractérise la vitesse à laquelle tout changement se produit dans le monde qui nous entoure (le mouvement de la matière dans l'espace et le temps). Le déplacement d'un piéton sur le trottoir, le vol d'un oiseau, la propagation du son, des ondes radio ou de la lumière dans l'air, l'écoulement de l'eau d'un tuyau, le mouvement des nuages, l'évaporation de l'eau, le réchauffement d'un fer - tous ces phénomènes sont caractérisés par une certaine vitesse.
Dans le mouvement mécanique des corps, la vitesse caractérise non seulement la vitesse, mais aussi la direction du mouvement, c'est-à-dire quantité vectorielle.
La vitesse $υ↖(→)$ d'un point est la limite du rapport du mouvement $∆r↖(→)$ à l'intervalle de temps $∆t$ pendant lequel ce mouvement s'est produit, car $∆t$ tend vers zéro (c'est-à-dire la dérivée $∆r↖(→)$ par $t$) :
$υ↖(→)=(lim)↙(∆t→0)(∆r↖(→))/(∆t)=r↖(→)_1"$
Les composantes du vecteur vitesse le long des axes $X, Y, Z$ sont déterminées de la même manière :
$υ↖(→)_x=(lim)↙(∆t→0)(∆x)/(∆t)=x"; υ_y=y"; υ_z=z"$
La notion de vitesse ainsi définie est aussi appelée Vitesse instantanée. Cette définition de la vitesse est valable pour tout type de mouvement - de curviligne inégal à rectiligne uniforme. Lorsqu'ils parlent de vitesse lors d'un mouvement irrégulier, cela signifie vitesse instantanée. La nature vectorielle de la vitesse découle directement de cette définition, puisque en mouvement- quantité vectorielle. Le vecteur vitesse instantanée $υ↖(→)$ est toujours dirigé tangentiellement à la trajectoire du mouvement. Il indique la direction dans laquelle le corps se déplacerait si, à partir du moment $t$, l'action de tout autre corps sur lui cessait.

vitesse moyenne
La vitesse moyenne d'un point est introduite pour caractériser un mouvement irrégulier (c'est-à-dire un mouvement à vitesse variable) et est déterminée de deux manières.
1. La vitesse moyenne d'un point $υ_(av)$ est égale au rapport de l'ensemble du chemin $∆s$ parcouru par le corps à la durée totale du mouvement $∆t$ :
$υ↖(→)_(moy)=(∆s)/(∆t)$
Avec cette définition, la vitesse moyenne est un scalaire, puisque la distance parcourue (distance) et le temps sont des quantités scalaires.
Cette méthode de détermination donne une idée de vitesse moyenne de déplacement sur le tronçon de trajectoire (vitesse sol moyenne).
2. La vitesse moyenne d’un point est égale au rapport du mouvement du point à la durée pendant laquelle ce mouvement s’est produit :
$υ↖(→)_(moy)=(∆r↖(→))/(∆t)$
La vitesse moyenne de déplacement est une grandeur vectorielle.
Pour un mouvement curviligne irrégulier, une telle définition de la vitesse moyenne ne permet pas toujours de déterminer même approximativement les vitesses réelles le long du trajet du mouvement du point. Par exemple, si un point s'est déplacé le long d'un chemin fermé pendant un certain temps, alors son déplacement est égal à zéro (mais la vitesse était clairement différente de zéro). Dans ce cas, il est préférable d’utiliser la première définition de la vitesse moyenne.
Dans tous les cas, il faut distinguer ces deux définitions de la vitesse moyenne et savoir de laquelle on parle.

Loi d'addition de vitesses
La loi d'addition des vitesses établit un lien entre les valeurs de vitesse d'un point matériel par rapport à différents systèmes de référence se déplaçant les uns par rapport aux autres. En physique non relativiste (classique), lorsque les vitesses considérées sont petites par rapport à la vitesse de la lumière, la loi d'addition des vitesses de Galilée est valable, qui s'exprime par la formule :
$υ↖(→)_2=υ↖(→)_1+υ↖(→)$
où $υ↖(→)_2$ et $υ↖(→)_1$ sont les vitesses du corps (point) par rapport à deux systèmes de référence inertiels - un référentiel stationnaire $K_2$ et un référentiel $K_1$ se déplaçant à une vitesse $υ↖(→ )$ par rapport à $K_2$.
La formule peut être obtenue en additionnant les vecteurs de déplacement.
Pour plus de clarté, considérons le mouvement d'un bateau avec une vitesse de $υ↖(→)_1$ par rapport à la rivière (référentiel $K_1$), dont les eaux se déplacent avec une vitesse de $υ↖(→) $ par rapport au rivage (référentiel $K_2$).

Les vecteurs déplacement du bateau par rapport à l'eau $∆r↖(→)_1$, la rivière par rapport au rivage $∆r↖(→)$ et le vecteur déplacement total du bateau par rapport au rivage $∆r↖ (→)_2$ sont illustrés sur la figure.

Mathématiquement:
$∆r↖(→)_2=∆r↖(→)_1+∆r↖(→)$
En divisant les deux côtés de l'équation par l'intervalle de temps $∆t$, nous obtenons :
$(∆r↖(→)_2)/(∆t)=(∆r↖(→)_1)/(∆t)+(∆r↖(→))/(∆t)$
Dans les projections du vecteur vitesse sur les axes de coordonnées, l'équation a la forme :
$υ_(2x)=υ_(1x)+υ_x,$
$υ_(2y)=υ_(1y)+υ_y.$
Les projections de vitesse sont ajoutées algébriquement.
Vitesse relative
De la loi d'addition des vitesses il s'ensuit que si deux corps se déplacent dans le même référentiel avec des vitesses $υ↖(→)_1$ et $υ↖(→)_2$, alors la vitesse du premier corps par rapport au second $υ↖(→) _(12)$ est égal à la différence des vitesses de ces corps :
$υ↖(→)_(12)=υ↖(→)_1-υ↖(→)_2$
Ainsi, lorsque des corps se déplacent dans une direction (dépassement), le module de vitesse relative est égal à la différence de vitesses, et lorsqu'ils se déplacent dans la direction opposée, à la somme des vitesses.
Accélération d'un point matériel
L'accélération est une grandeur caractérisant le taux de changement de vitesse. En règle générale, le mouvement est irrégulier, c'est-à-dire qu'il se produit à une vitesse variable. Dans certaines parties de la trajectoire d'un corps, la vitesse peut être plus grande, dans d'autres moins. Par exemple, un train quittant une gare avance de plus en plus vite au fil du temps. En approchant de la gare, il ralentit au contraire.
L'accélération (ou accélération instantanée) est une grandeur physique vectorielle égale à la limite du rapport du changement de vitesse à la période de temps pendant laquelle ce changement s'est produit, lorsque $∆t$ tend vers zéro (c'est-à-dire la dérivée de $ υ↖(→)$ par rapport à $ t$) :
$a↖(→)=lim↙(∆t→0)(∆υ↖(→))/(∆t)=υ↖(→)_t"$
Les composantes $a↖(→) (a_x, a_y, a_z)$ sont respectivement égales :
$a_x=υ_x";a_y=υ_y";a_z=υ_z"$
L'accélération, comme le changement de vitesse, est dirigée vers la concavité de la trajectoire et peut être décomposée en deux composantes - tangentiel- tangentiellement à la trajectoire du mouvement - et normale- perpendiculaire à la trajectoire.

Conformément à cela, la projection de l'accélération $а_х$ sur la tangente à la trajectoire est appelée tangente, ou tangentiel accélération, projection $a_n$ sur la normale - normale, ou accélération centripète.
L'accélération tangentielle détermine l'ampleur du changement dans la valeur numérique de la vitesse :
$a_t=lim↙(∆t→0)(∆υ)/(∆t)$
L'accélération normale ou centripète caractérise le changement de direction de la vitesse et est déterminée par la formule :
où R est le rayon de courbure de la trajectoire en son point correspondant.
Le module d'accélération est déterminé par la formule :
$a=√(a_t^2+a_n^2)$
En mouvement rectiligne, l'accélération totale $a$ est égale à l'accélération tangentielle $a=a_t$, puisque l'accélération centripète $a_n=0$.
L'unité SI d'accélération est l'accélération à laquelle la vitesse d'un corps change de 1 m/s par seconde. Cette unité est notée 1 m/s 2 et est appelée « mètre par seconde carrée ».
Mouvement linéaire uniforme
Le mouvement d’un point est dit uniforme s’il parcourt des distances égales dans des périodes de temps égales.
Par exemple, si une voiture parcourt 20 km par quart d'heure (15 minutes), 40 km par demi-heure (30 minutes), 80 km par heure (60 minutes), etc., alors un tel mouvement est considéré comme uniforme. Avec un mouvement uniforme, la valeur numérique (module) de la vitesse du point $υ$ est une valeur constante :
$υ=|υ↖(→)|=const$
Un mouvement uniforme peut se produire le long d’une trajectoire courbe ou droite.
La loi du mouvement uniforme d'un point est décrite par l'équation :
où $s$ est la distance mesurée le long de l'arc de trajectoire à partir d'un certain point de la trajectoire pris comme origine ; $t$ - heure d'un point sur le chemin ; $s_0$ - valeur de $s$ à l'instant initial $t=0$.
Le chemin parcouru par un instant $t$ est déterminé par le terme $υt$.
Mouvement linéaire uniforme- il s'agit d'un mouvement dans lequel un corps se déplace à une vitesse constante en ampleur et en direction :
$υ↖(→)=const$
La vitesse d'un mouvement rectiligne uniforme est une valeur constante et peut être définie comme le rapport du mouvement d'un point à la période de temps pendant laquelle ce mouvement s'est produit :
$υ↖(→)=(∆r↖(→))/(∆t)$
Module de cette vitesse
$υ=(|∆r↖(→)|)/(∆t)$
en sens, c'est la distance $s=|∆r↖(→)|$ parcourue par le point pendant le temps $∆t$.
La vitesse d'un corps en mouvement rectiligne uniforme est une quantité égale au rapport du trajet $s$ au temps pendant lequel ce trajet est parcouru :
Le déplacement lors d'un mouvement linéaire uniforme (le long de l'axe X) peut être calculé à l'aide de la formule :
où $υ_x$ est la projection de la vitesse sur l'axe X. La loi du mouvement rectiligne uniforme a donc la forme :
Si à l'instant initial $x_0=0$, alors
Le graphique de la vitesse en fonction du temps est une ligne droite parallèle à l’axe des x, et la distance parcourue est l’aire située sous cette ligne droite.

Le graphique du trajet en fonction du temps est une ligne droite dont l'angle d'inclinaison par rapport à l'axe du temps $Ot$ est plus grand, plus la vitesse de mouvement uniforme est grande. La tangente de cet angle est égale à la vitesse.
Nous savons que tous les corps s'attirent. La Lune, par exemple, est notamment attirée par la Terre. Mais la question se pose : si la Lune est attirée par la Terre, pourquoi tourne-t-elle autour d'elle au lieu de tomber vers la Terre ?
Afin de répondre à cette question, il est nécessaire de considérer les types de mouvements des corps. Nous savons déjà que le mouvement peut être uniforme et inégal, mais il existe d’autres caractéristiques du mouvement. En particulier, selon la direction, on distingue les mouvements rectilignes et curvilignes.
Mouvement en ligne droite
On sait qu’un corps se déplace sous l’influence d’une force qui lui est appliquée. Vous pouvez faire une expérience simple montrant comment la direction du mouvement d’un corps dépend de la direction de la force qui lui est appliquée. Pour ce faire, vous aurez besoin d'un petit objet arbitraire, d'un cordon en caoutchouc et d'un support horizontal ou vertical.
Attache le cordon à une extrémité au support. A l'autre extrémité du cordon nous attachons notre objet. Maintenant, si nous tirons notre objet sur une certaine distance puis le relâchons, nous verrons comment il commence à se déplacer en direction du support. Son mouvement est provoqué par la force élastique du cordon. C’est ainsi que la Terre attire tous les corps à sa surface, ainsi que les météorites volant depuis l’espace.
Seulement, à la place de la force élastique, la force d'attraction agit. Prenons maintenant notre objet avec un élastique et poussons-le non pas dans le sens rapproche/éloignement du support, mais le long de celui-ci. Si l’objet n’était pas sécurisé, il s’envolerait tout simplement. Mais comme il est retenu par une corde, le ballon, en se déplaçant sur le côté, étire légèrement le cordon, ce qui le tire vers l'arrière, et le ballon change légèrement de direction vers le support.
Mouvement curviligne en cercle
Cela se produit à tout moment ; par conséquent, la balle ne se déplace pas le long de la trajectoire originale, mais pas non plus directement vers le support. La balle se déplacera autour du support en cercle. La trajectoire de son mouvement sera curviligne. C’est ainsi que la Lune se déplace autour de la Terre sans tomber dessus.
C'est ainsi que la gravité terrestre capture les météorites qui volent près de la Terre, mais pas directement vers elle. Ces météorites deviennent les satellites de la Terre. De plus, la durée pendant laquelle ils resteront en orbite dépend de leur angle de mouvement initial par rapport à la Terre. Si leur mouvement était perpendiculaire à la Terre, ils peuvent alors rester en orbite indéfiniment. Si l’angle était inférieur à 90°, ils se déplaceront en spirale descendante et tomberont progressivement au sol.
Mouvement circulaire avec une vitesse de module constante
Un autre point à noter est que la vitesse du mouvement curviligne autour d’un cercle varie en direction, mais est la même en valeur. Et cela signifie que le mouvement en cercle avec une vitesse absolue constante se produit uniformément accéléré.
Puisque la direction du mouvement change, cela signifie que le mouvement se produit avec une accélération. Et comme il change également à chaque instant, le mouvement sera donc uniformément accéléré. Et la force de gravité est la force qui provoque une accélération constante.
La Lune se déplace autour de la Terre précisément à cause de cela, mais si soudainement le mouvement de la Lune change, par exemple si une très grosse météorite s'écrase dessus, elle pourrait alors quitter son orbite et tomber sur la Terre. Nous ne pouvons qu’espérer que ce moment n’arrive jamais. Ainsi va.