Movimiento rectilíneo y curvilíneo. Movimiento lineal y circular
6. Movimiento curvilíneo. Desplazamiento angular, velocidad angular y aceleración de un cuerpo. Trayectoria y desplazamiento durante el movimiento curvilíneo de un cuerpo.
movimiento curvilíneo– es un movimiento cuya trayectoria es una línea curva (por ejemplo, un círculo, una elipse, una hipérbola, una parábola). Un ejemplo de movimiento curvilíneo es el movimiento de los planetas, el final de la manecilla de un reloj a lo largo de una esfera, etc. En general velocidad curvilínea cambios de magnitud y dirección.
Movimiento curvilíneo de un punto material. se considera movimiento uniforme si el módulo velocidad constante (por ejemplo, movimiento uniforme en un círculo) y uniformemente acelerado si el módulo y la dirección velocidad cambios (por ejemplo, el movimiento de un cuerpo lanzado en ángulo con la horizontal).
Arroz. 1.19. Trayectoria y vector de movimiento durante el movimiento curvilíneo.
Al moverse por un camino curvo vector de desplazamiento dirigido a lo largo de la cuerda (Fig. 1.19), y yo- longitud trayectorias . La velocidad instantánea del cuerpo (es decir, la velocidad del cuerpo en un punto dado de la trayectoria) se dirige tangencialmente al punto de la trayectoria donde se encuentra actualmente el cuerpo en movimiento (figura 1.20).
 Arroz. 1.20. Velocidad instantánea durante el movimiento curvo.
Arroz. 1.20. Velocidad instantánea durante el movimiento curvo.
El movimiento curvilíneo es siempre un movimiento acelerado. Eso es aceleración durante el movimiento curvo siempre está presente, incluso si el módulo de velocidad no cambia, sino que sólo cambia la dirección de la velocidad. El cambio de velocidad por unidad de tiempo es aceleración tangencial :
 o
o 
Dónde v τ ,v 0 – valores de velocidad en el momento del tiempo t 0 +Δt Y t 0 respectivamente.
aceleración tangencial en un punto dado de la trayectoria la dirección coincide con la dirección de la velocidad del cuerpo o es opuesta a ella.
aceleración normal es el cambio de velocidad en dirección por unidad de tiempo:

aceleración normal dirigido a lo largo del radio de curvatura de la trayectoria (hacia el eje de rotación). La aceleración normal es perpendicular a la dirección de la velocidad.
Aceleración centrípeta es la aceleración normal durante el movimiento circular uniforme.
Aceleración total durante el movimiento curvilíneo uniforme de un cuerpo. es igual a:

El movimiento de un cuerpo a lo largo de una trayectoria curva se puede representar aproximadamente como un movimiento a lo largo de arcos de ciertos círculos (figura 1.21).
 Arroz. 1.21. Movimiento de un cuerpo durante el movimiento curvilíneo.
Arroz. 1.21. Movimiento de un cuerpo durante el movimiento curvilíneo.
movimiento curvilíneo
Movimientos curvilíneos– movimientos cuyas trayectorias no son rectas, sino curvas. Los planetas y las aguas de los ríos se mueven a lo largo de trayectorias curvilíneas.
El movimiento curvilíneo es siempre un movimiento con aceleración, incluso si el valor absoluto de la velocidad es constante. El movimiento curvilíneo con aceleración constante siempre ocurre en el plano en el que se encuentran los vectores de aceleración y las velocidades iniciales del punto. En el caso de un movimiento curvilíneo con aceleración constante en el plano. xoy proyecciones v X Y v y su velocidad en el eje Buey Y Oye y coordenadas X Y y puntos en cualquier momento t determinado por fórmulas
![]()
![]()
Un caso especial de movimiento curvilíneo es el movimiento circular. El movimiento circular, incluso uniforme, siempre es un movimiento acelerado: el módulo de velocidad siempre se dirige tangencialmente a la trayectoria, cambiando constantemente de dirección, por lo que el movimiento circular siempre ocurre con aceleración centrípeta donde r– radio del círculo.
El vector de aceleración cuando se mueve en círculo se dirige hacia el centro del círculo y es perpendicular al vector de velocidad.
En el movimiento curvilíneo, la aceleración se puede representar como la suma de las componentes normal y tangencial:
La aceleración normal (centrípeta) se dirige hacia el centro de curvatura de la trayectoria y caracteriza el cambio de velocidad en la dirección:
v – valor de velocidad instantánea, r– radio de curvatura de la trayectoria en un punto dado.
La aceleración tangencial (tangencial) se dirige tangencialmente a la trayectoria y caracteriza el cambio en el módulo de velocidad.
La aceleración total con la que se mueve un punto material es igual a:

Además de la aceleración centrípeta, las características más importantes del movimiento circular uniforme son el período y la frecuencia de revolución.
Periodo de circulación- este es el tiempo que le toma al cuerpo completar una revolución .
El período está indicado por la letra. t(c) y está determinado por la fórmula:
Dónde t- tiempo de circulación, PAG- el número de revoluciones completadas durante este tiempo.
Frecuencia- esta es una cantidad numéricamente igual al número de revoluciones completadas por unidad de tiempo.
La frecuencia se denota con una letra griega (nu) y se calcula mediante la fórmula:
La frecuencia se mide en 1/s.
El período y la frecuencia son cantidades mutuamente inversas:
Si un cuerpo se mueve en círculo con velocidad v, hace una revolución, entonces la distancia recorrida por este cuerpo se puede encontrar multiplicando la velocidad v para el tiempo de una revolución:
l = vT. Por otro lado, este camino es igual a la circunferencia del círculo 2π r. Es por eso
vT = 2π r,
![]()
Dónde w(t-1) - velocidad angular.
A una frecuencia de rotación constante, la aceleración centrípeta es directamente proporcional a la distancia desde la partícula en movimiento al centro de rotación.
Velocidad angular (w) – un valor igual a la relación entre el ángulo de rotación del radio en el que se encuentra el punto de rotación y el período de tiempo durante el cual se produjo esta rotación:
![]() .
.
Relación entre velocidades lineales y angulares:
El movimiento de un cuerpo puede considerarse conocido sólo cuando se sabe cómo se mueve cada punto. El movimiento más simple de los cuerpos sólidos es el de traslación. Progresivo es el movimiento de un cuerpo rígido en el que cualquier recta trazada en este cuerpo se mueve paralela a sí misma.
Dependiendo de la forma de la trayectoria, el movimiento se puede dividir en rectilíneo y curvilíneo. La mayoría de las veces encontramos movimientos curvilíneos cuando la trayectoria se representa como una curva. Un ejemplo de este tipo de movimiento es la trayectoria de un cuerpo lanzado en ángulo con respecto al horizonte, el movimiento de la Tierra alrededor del Sol, los planetas, etc.
Foto 1 . Trayectoria y movimiento en movimiento curvo.
Definición 1movimiento curvilíneo Se llama movimiento cuya trayectoria es una línea curva. Si un cuerpo se mueve a lo largo de una trayectoria curva, entonces el vector de desplazamiento s → se dirige a lo largo de la cuerda, como se muestra en la Figura 1, y l es la longitud de la trayectoria. La dirección de la velocidad instantánea del cuerpo se mueve a lo largo de una tangente en el mismo punto de la trayectoria donde se encuentra actualmente el objeto en movimiento, como se muestra en la Figura 2.

Figura 2. Velocidad instantánea durante el movimiento curvo.
Definición 2
Movimiento curvilíneo de un punto material. se llama uniforme cuando el módulo de velocidad es constante (movimiento circular) y se acelera uniformemente cuando la dirección y el módulo de velocidad cambian (movimiento de un cuerpo lanzado).
El movimiento curvilíneo siempre es acelerado. Esto se explica por el hecho de que incluso con un módulo de velocidad sin cambios y una dirección cambiada, la aceleración siempre está presente.
Para estudiar el movimiento curvilíneo de un punto material, se utilizan dos métodos.
El camino se divide en tramos separados, en cada uno de los cuales se puede considerar recto, como se muestra en la Figura 3.
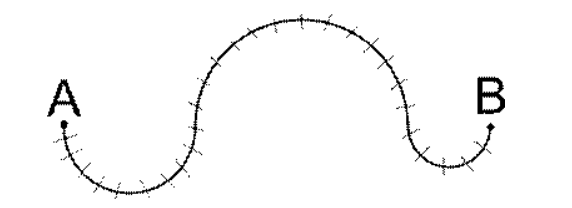
Figura 3. Dividir el movimiento curvilíneo en traslacional
Ahora se puede aplicar la ley del movimiento rectilíneo a cada sección. Este principio está permitido.
Se considera que el método de solución más conveniente representa el camino como un conjunto de varios movimientos a lo largo de arcos circulares, como se muestra en la Figura 4. El número de particiones será mucho menor que en el método anterior, además, el movimiento a lo largo del círculo ya es curvilíneo.

Figura 4. Dividir el movimiento curvilíneo en movimiento a lo largo de arcos circulares
Nota 1
Para registrar el movimiento curvilíneo, es necesario poder describir el movimiento en un círculo y representar el movimiento arbitrario en forma de conjuntos de movimientos a lo largo de los arcos de estos círculos.
El estudio del movimiento curvilíneo incluye la elaboración de una ecuación cinemática que describe este movimiento y permite, en función de las condiciones iniciales disponibles, determinar todas las características del movimiento.
Ejemplo 1
Dado un punto material que se mueve a lo largo de una curva, como se muestra en la Figura 4. Los centros de los círculos O 1, O 2, O 3 están ubicados en la misma línea recta. Necesidad de encontrar el desplazamiento.
s → y longitud del camino l mientras se mueve del punto A al B.
Solución
Por condición, tenemos que los centros del círculo pertenecen a la misma recta, por tanto:
s → = R 1 + 2 R 2 + R 3 .
Dado que la trayectoria del movimiento es la suma de semicírculos, entonces:
l ~ UNA segundo = π R 1 + R 2 + R 3 .
Respuesta: s → = R 1 + 2 R 2 + R 3, l ~ A B = π R 1 + R 2 + R 3.
Ejemplo 2
La dependencia de la distancia recorrida por el cuerpo con el tiempo está dada, representada por la ecuación s (t) = A + B t + C t 2 + D t 3 (C = 0,1 m / s 2, D = 0,003 m / s 3). Calcule después de qué período de tiempo después del inicio del movimiento la aceleración del cuerpo será igual a 2 m / s 2
Solución

Respuesta: t = 60 s.
Si nota un error en el texto, resáltelo y presione Ctrl+Enter
Movimiento mecánico. Relatividad del movimiento mecánico. Sistema de referencia
Se entiende por movimiento mecánico un cambio en el tiempo en la posición relativa de los cuerpos o sus partes en el espacio: por ejemplo, el movimiento de los cuerpos celestes, las vibraciones de la corteza terrestre, las corrientes de aire y mar, el movimiento de aviones y vehículos, máquinas y mecanismos, deformación de elementos estructurales y estructuras, movimiento líquidos y gases, etc.
Relatividad del movimiento mecánico.
Conocemos la relatividad del movimiento mecánico desde la infancia. Entonces, sentados en un tren y viendo cómo un tren que antes estaba parado en una vía paralela comienza a moverse, a menudo no podemos determinar cuál de los trenes realmente comenzó a moverse. Y aquí debemos aclarar de inmediato: ¿moverse en relación con qué? Respecto a la Tierra, por supuesto. Porque comenzamos a movernos con respecto al tren vecino, independientemente de cuál de los trenes inició su movimiento con respecto a la Tierra.
La relatividad del movimiento mecánico radica en la relatividad de las velocidades de movimiento de los cuerpos: las velocidades de los cuerpos en relación con diferentes sistemas de referencia serán diferentes (la velocidad de una persona que se mueve en un tren, barco, avión diferirá tanto en magnitud como en dirección, dependiendo del sistema de referencia en el que se determinan estas velocidades: en el sistema de referencia asociado a un vehículo en movimiento, o con una Tierra estacionaria).
Las trayectorias del movimiento corporal en diferentes sistemas de referencia también serán diferentes. Por ejemplo, las gotas de lluvia que caen verticalmente sobre el suelo dejarán una marca en forma de chorros oblicuos en la ventanilla de un tren en movimiento. De la misma manera, cualquier punto de la hélice en rotación de un avión en vuelo o de un helicóptero que desciende al suelo describe un círculo con respecto al avión y una curva mucho más compleja: una línea helicoidal con respecto a la Tierra. Así, en el caso del movimiento mecánico, la trayectoria del movimiento también es relativa.
El camino recorrido por el cuerpo también depende del marco de referencia. Volviendo al mismo pasajero sentado en el tren, entendemos que el camino recorrido por él con respecto al tren durante el viaje es igual a cero (si no se movió por el vagón) o, en cualquier caso, mucho menor que el camino. viajó junto con el tren en relación con la Tierra. Así, en el caso del movimiento mecánico, la trayectoria también es relativa.
La conciencia de la relatividad del movimiento mecánico (es decir, que el movimiento de un cuerpo puede considerarse en diferentes sistemas de referencia) condujo a la transición del sistema geocéntrico del mundo de Ptolomeo al sistema heliocéntrico de Copérnico. Ptolomeo, siguiendo el movimiento del Sol y de las estrellas en el cielo observado desde la antigüedad, colocó a la Tierra estacionaria en el centro del Universo con el resto de cuerpos celestes girando a su alrededor. Copérnico creía que la Tierra y otros planetas giraban alrededor del Sol y al mismo tiempo alrededor de sus ejes.
Así, un cambio en el sistema de referencia (la Tierra - en el sistema geocéntrico del mundo y el Sol - en el sistema heliocéntrico) condujo a un sistema heliocéntrico mucho más progresivo, lo que permite resolver muchos problemas científicos y aplicados de la astronomía. y cambiar la visión de la humanidad sobre el Universo.
El sistema de coordenadas $X, Y, Z$, el cuerpo de referencia al que está asociado y el dispositivo para medir el tiempo (reloj) forman un sistema de referencia con respecto al cual se considera el movimiento del cuerpo.

Organismo de referencia Se llama cuerpo respecto del cual se considera el cambio en la posición de otros cuerpos en el espacio.
El sistema de referencia se puede elegir arbitrariamente. En estudios cinemáticos, todos los sistemas de referencia son iguales. En problemas de dinámica, también se pueden utilizar cualquier sistema de referencia que se mueva arbitrariamente, pero los sistemas de referencia inerciales son los más convenientes, ya que en ellos las características del movimiento tienen una forma más simple.
punto material
Un punto material es un objeto de tamaño insignificante que tiene masa.
Se introduce el concepto de “punto material” para describir (mediante fórmulas matemáticas) el movimiento mecánico de los cuerpos. Esto se hace porque es más fácil describir el movimiento de un punto que un cuerpo real, cuyas partículas también pueden moverse a diferentes velocidades (por ejemplo, durante la rotación del cuerpo o deformaciones).
Si un cuerpo real es reemplazado por un punto material, entonces la masa de este cuerpo se asigna a este punto, pero se desprecian sus dimensiones y, al mismo tiempo, la diferencia en las características del movimiento de sus puntos (velocidades, aceleraciones, etc.), si existe alguna, se descuida. ¿En qué casos se puede hacer esto?
Casi cualquier cuerpo puede considerarse como un punto material si las distancias recorridas por los puntos del cuerpo son muy grandes en comparación con su tamaño.
Por ejemplo, la Tierra y otros planetas se consideran puntos materiales al estudiar su movimiento alrededor del Sol. En este caso, las diferencias en el movimiento de varios puntos de cualquier planeta, provocadas por su rotación diaria, no afectan las cantidades que describen el movimiento anual.
En consecuencia, si en el movimiento de un cuerpo en estudio se puede despreciar su rotación alrededor de un eje, dicho cuerpo puede representarse como un punto material.
Sin embargo, al resolver problemas relacionados con la rotación diaria de los planetas (por ejemplo, al determinar la salida del sol en diferentes lugares de la superficie del globo), no tiene sentido considerar un planeta como un punto material, ya que el resultado del problema Depende del tamaño de este planeta y de la velocidad de movimiento de los puntos en su superficie.
Es legítimo considerar un avión como un punto material si es necesario, por ejemplo, determinar la velocidad media de su movimiento en el camino de Moscú a Novosibirsk. Pero al calcular la fuerza de resistencia del aire que actúa sobre un avión en vuelo, no se puede considerar un punto material, ya que la fuerza de resistencia depende del tamaño y la forma del avión.
Si un cuerpo se mueve traslacionalmente, incluso si sus dimensiones son comparables a las distancias que recorre, este cuerpo puede considerarse como un punto material (ya que todos los puntos del cuerpo se mueven de la misma manera).
En conclusión, podemos decir: un cuerpo cuyas dimensiones pueden despreciarse en las condiciones del problema considerado puede considerarse un punto material.
Trayectoria
Una trayectoria es una línea (o, como dicen, una curva) que describe un cuerpo cuando se mueve con respecto a un cuerpo de referencia seleccionado.
Tiene sentido hablar de trayectoria sólo en el caso de que el cuerpo pueda representarse como un punto material.
Las trayectorias pueden tener diferentes formas. A veces es posible juzgar la forma de una trayectoria por la huella visible que deja un cuerpo en movimiento, por ejemplo, un avión en vuelo o un meteoro que atraviesa el cielo nocturno.
La forma de la trayectoria depende de la elección del cuerpo de referencia. Por ejemplo, en relación con la Tierra, la trayectoria de la Luna es un círculo; en relación con el Sol, es una línea de forma más compleja.

Cuando se estudia el movimiento mecánico, la Tierra suele considerarse como un cuerpo de referencia.
Métodos para especificar la posición de un punto y describir su movimiento.
La posición de un punto en el espacio se especifica de dos formas: 1) mediante coordenadas; 2) usando el vector de radio.
La posición de un punto mediante coordenadas se especifica mediante tres proyecciones del punto $x, y, z$ sobre los ejes del sistema de coordenadas cartesiano $OX, OU, OZ$ asociado al cuerpo de referencia. Para hacer esto, desde el punto A es necesario bajar las perpendiculares en el plano $YZ$ (coordenada $x$), $ХZ$ (coordenada $y$), $ХУ$ (coordenada $z$), respectivamente. Se escribe así: $A(x, y, z)$. Para un caso específico, $(x=6, y=10.2, z= 4.5$), el punto $A$ se designa $A(6; 10; 4.5)$.

Por el contrario, si se dan valores específicos de las coordenadas de un punto en un sistema de coordenadas dado, entonces para representar el punto en sí es necesario trazar los valores de las coordenadas en los ejes correspondientes ($x$ al $ eje OX$, etc.) y construya un paralelepípedo sobre estos tres segmentos mutuamente perpendiculares. Su vértice, opuesto al origen de coordenadas $O$ y situado en la diagonal del paralelepípedo, será el punto deseado $A$.
Si un punto se mueve dentro de un determinado plano, entonces basta con dibujar dos ejes de coordenadas a través de los puntos seleccionados en el cuerpo de referencia: $OX$ y $OU$. Entonces la posición del punto en el plano está determinada por dos coordenadas $x$ e $y$.

Si un punto se mueve en línea recta, basta con fijar un eje de coordenadas OX y dirigirlo a lo largo de la línea de movimiento.
La posición del punto $A$ mediante el vector de radio se establece conectando el punto $A$ al origen de coordenadas $O$. El segmento dirigido $OA = r↖(→)$ se llama vector de radio.
vector de radio es un vector que conecta el origen con la posición de un punto en un momento arbitrario en el tiempo.
Un punto se especifica mediante un vector de radio si se conocen su longitud (módulo) y su dirección en el espacio, es decir, los valores de sus proyecciones $r_x, r_y, r_z$ sobre los ejes de coordenadas $OX, OY, OZ$ o los ángulos entre el vector de radio y los ejes de coordenadas. Para el caso del movimiento en un plano tenemos:
Aquí $r=|r↖(→)|$ es el módulo del radio vector $r↖(→), r_x$ y $r_y$ son sus proyecciones sobre los ejes de coordenadas, las tres cantidades son escalares; xzhu - coordenadas del punto A.
Las últimas ecuaciones demuestran la conexión entre los métodos de coordenadas y vectores para especificar la posición de un punto.
El vector $r↖(→)$ también se puede descomponer en componentes a lo largo de los ejes $X$ e $Y$, es decir, representado como la suma de dos vectores:
$r↖(→)=r↖(→)_x+r↖(→)_y$
Por tanto, la posición de un punto en el espacio se especifica mediante sus coordenadas o mediante el vector radio.
Formas de describir el movimiento de un punto.
De acuerdo con los métodos para especificar coordenadas, el movimiento de un punto se puede describir: 1) por el método de coordenadas; 2) método vectorial.
Con el método de coordenadas para describir (o especificar) el movimiento, el cambio en las coordenadas de un punto a lo largo del tiempo se escribe en forma de funciones de sus tres coordenadas versus el tiempo:
Las ecuaciones se denominan ecuaciones cinemáticas de movimiento de un punto, escritas en forma de coordenadas. Conociendo las ecuaciones cinemáticas del movimiento y las condiciones iniciales (es decir, la posición del punto en el momento inicial), es posible determinar la posición del punto en cualquier momento.
Con el método vectorial para describir el movimiento de un punto, el cambio en su posición a lo largo del tiempo viene dado por la dependencia del radio vector del tiempo:
$r↖(→)=r↖(→)(t)$
La ecuación es la ecuación de movimiento de un punto, escrita en forma vectorial. Si se conoce, entonces, en cualquier momento, es posible calcular el radio vector del punto, es decir, determinar su posición (como en el caso del método de coordenadas). Por tanto, especificar tres ecuaciones escalares equivale a especificar una ecuación vectorial.
Para cada caso de movimiento, la forma de las ecuaciones será bastante específica. Si la trayectoria del movimiento de un punto es recta, el movimiento se llama rectilíneo, y si es curvo, se llama curvilíneo.
Movimiento y camino
El desplazamiento en mecánica es un vector que conecta las posiciones de un punto en movimiento al principio y al final de un cierto período de tiempo.
El concepto de vector de desplazamiento se introduce para resolver el problema de la cinemática: determinar la posición de un cuerpo (punto) en el espacio en un momento dado, si se conoce su posición inicial.
En la Fig. el vector $(M_1M_2)↖(-)$ conecta dos posiciones de un punto en movimiento - $M_1$ y $M_2$ en los momentos $t_1$ y $t_2$ respectivamente y, según la definición, es un vector de desplazamiento. Si el punto $M_1$ está especificado por el vector de radio $r↖(→)_1$, y el punto $M_2$ está especificado por el vector de radio $r↖(→)_2$, entonces, como se puede ver en la figura, el vector de desplazamiento es igual a la diferencia de estos dos vectores, es decir, el cambio en el vector de radio a lo largo del tiempo $∆t=t_2-t_1$:
$∆r↖(→)=r↖(→)_2-r↖(→)_1$.
La suma de desplazamientos (por ejemplo, en dos secciones adyacentes de la trayectoria) $∆r↖(→)_1$ y $∆r↖(→)_2$ se realiza de acuerdo con la regla de la suma de vectores:
$∆r=∆r↖(→)_2+∆r↖(→)_1$
El camino es la longitud del tramo de trayectoria recorrido por un punto material durante un período de tiempo determinado. La magnitud del vector de desplazamiento en el caso general no es igual a la longitud de la trayectoria recorrida por el punto durante el tiempo $∆t$ (la trayectoria puede ser curvilínea y, además, el punto puede cambiar la dirección del movimiento ).
La magnitud del vector de desplazamiento es igual a la trayectoria sólo para el movimiento rectilíneo en una dirección. Si la dirección del movimiento lineal cambia, la magnitud del vector de desplazamiento es menor que la trayectoria.
Durante el movimiento curvilíneo, la magnitud del vector de desplazamiento también es menor que la trayectoria, ya que la cuerda es siempre menor que la longitud del arco que subtiende.

Velocidad de un punto material
La velocidad caracteriza la velocidad con la que se producen cualquier cambio en el mundo que nos rodea (el movimiento de la materia en el espacio y el tiempo). El movimiento de un peatón por la acera, el vuelo de un pájaro, la propagación del sonido, las ondas de radio o la luz en el aire, el flujo de agua de una tubería, el movimiento de las nubes, la evaporación del agua, el calentamiento de una hierro: todos estos fenómenos se caracterizan por una cierta velocidad.
En el movimiento mecánico de cuerpos, la velocidad caracteriza no solo la velocidad, sino también la dirección del movimiento, es decir cantidad vectorial.
La velocidad $υ↖(→)$ de un punto es el límite de la relación entre el movimiento $∆r↖(→)$ y el intervalo de tiempo $∆t$ durante el cual ocurrió este movimiento, ya que $∆t$ tiende a cero (es decir, la derivada $∆r↖(→)$ por $t$):
$υ↖(→)=(lim)↙(∆t→0)(∆r↖(→))/(∆t)=r↖(→)_1"$
Las componentes del vector velocidad a lo largo de los ejes $X, Y, Z$ se determinan de manera similar:
$υ↖(→)_x=(lim)↙(∆t→0)(∆x)/(∆t)=x"; υ_y=y"; υ_z=z"$
El concepto de velocidad así definido también se denomina velocidad instantanea. Esta definición de velocidad es válida para cualquier tipo de movimiento - desde curvilíneo desigual a rectilíneo uniforme. Cuando hablan de velocidad durante un movimiento desigual, se refiere a velocidad instantánea. La naturaleza vectorial de la velocidad se deriva directamente de esta definición, ya que Moviente- cantidad vectorial. El vector de velocidad instantánea $υ↖(→)$ siempre se dirige tangencialmente a la trayectoria del movimiento. Indica la dirección en la que se movería el cuerpo si, desde el momento $t$, cesara la acción de cualquier otro cuerpo sobre él.

velocidad media
La velocidad promedio de un punto se introduce para caracterizar el movimiento desigual (es decir, movimiento con velocidad variable) y se determina de dos maneras.
1. La velocidad promedio de un punto $υ_(av)$ es igual a la relación entre el camino total $∆s$ recorrido por el cuerpo y el tiempo total de movimiento $∆t$:
$υ↖(→)_(promedio)=(∆s)/(∆t)$
Con esta definición, la velocidad promedio es escalar, ya que la distancia recorrida (distancia) y el tiempo son cantidades escalares.
Este método de determinación da una idea de velocidad promedio de movimiento en la sección de la trayectoria (velocidad promedio de avance).
2. La velocidad promedio de un punto es igual a la relación entre el movimiento del punto y el período de tiempo durante el cual ocurrió este movimiento:
$υ↖(→)_(promedio)=(∆r↖(→))/(∆t)$
La velocidad media de movimiento es una cantidad vectorial.
Para el movimiento curvilíneo desigual, tal definición de la velocidad promedio no siempre permite determinar, ni siquiera aproximadamente, las velocidades reales a lo largo de la trayectoria del movimiento del punto. Por ejemplo, si un punto se mueve a lo largo de una trayectoria cerrada durante algún tiempo, entonces su desplazamiento es igual a cero (pero la velocidad era claramente diferente de cero). En este caso, es mejor utilizar la primera definición de velocidad media.
En cualquier caso, conviene distinguir entre estas dos definiciones de velocidad media y saber de cuál estás hablando.

Ley de suma de velocidades.
La ley de la suma de velocidades establece una conexión entre los valores de la velocidad de un punto material en relación con diferentes sistemas de referencia que se mueven entre sí. En física no relativista (clásica), cuando las velocidades consideradas son pequeñas en comparación con la velocidad de la luz, es válida la ley de Galileo de suma de velocidades, que se expresa mediante la fórmula:
$υ↖(→)_2=υ↖(→)_1+υ↖(→)$
donde $υ↖(→)_2$ y $υ↖(→)_1$ son las velocidades del cuerpo (punto) relativas a dos sistemas de referencia inerciales: un sistema de referencia estacionario $K_2$ y un sistema de referencia $K_1$ que se mueve a una velocidad $υ↖(→ )$ relativa a $K_2$.
La fórmula se puede obtener sumando los vectores de desplazamiento.
Para mayor claridad, consideremos el movimiento de un barco con una velocidad de $υ↖(→)_1$ en relación con el río (marco de referencia $K_1$), cuyas aguas se mueven con una velocidad de $υ↖(→) $ relativo a la costa (marco de referencia $K_2$).

Los vectores de desplazamiento del barco con respecto al agua $∆r↖(→)_1$, el río con respecto a la orilla $∆r↖(→)$ y el vector de desplazamiento total del barco con respecto a la orilla $∆r↖ (→)_2$ se muestran en la Fig.

Matemáticamente:
$∆r↖(→)_2=∆r↖(→)_1+∆r↖(→)$
Dividiendo ambos lados de la ecuación por el intervalo de tiempo $∆t$, obtenemos:
$(∆r↖(→)_2)/(∆t)=(∆r↖(→)_1)/(∆t)+(∆r↖(→))/(∆t)$
En las proyecciones del vector velocidad sobre los ejes de coordenadas, la ecuación tiene la forma:
$υ_(2x)=υ_(1x)+υ_x,$
$υ_(2y)=υ_(1y)+υ_y.$
Las proyecciones de velocidad se suman algebraicamente.
Velocidad relativa
De la ley de la suma de velocidades se deduce que si dos cuerpos se mueven en el mismo sistema de referencia con velocidades $υ↖(→)_1$ y $υ↖(→)_2$, entonces la velocidad del primer cuerpo con respecto al segundo $υ↖(→) _(12)$ es igual a la diferencia de velocidades de estos cuerpos:
$υ↖(→)_(12)=υ↖(→)_1-υ↖(→)_2$
Así, cuando los cuerpos se mueven en una dirección (adelantamiento), el módulo de velocidad relativa es igual a la diferencia de velocidades, y cuando se mueven en la dirección opuesta, es la suma de las velocidades.
Aceleración de un punto material.
La aceleración es una cantidad que caracteriza la tasa de cambio de velocidad. Como regla general, el movimiento es desigual, es decir, se produce a velocidad variable. En algunas partes de la trayectoria de un cuerpo, la velocidad puede ser mayor, en otras, menor. Por ejemplo, un tren que sale de una estación se mueve cada vez más rápido con el tiempo. Al acercarse a la estación, por el contrario, reduce la velocidad.
La aceleración (o aceleración instantánea) es una cantidad física vectorial igual al límite de la relación entre el cambio de velocidad y el período de tiempo durante el cual ocurrió este cambio, cuando $∆t$ tiende a cero (es decir, la derivada de $ υ↖(→)$ con respecto a $t$):
$a↖(→)=lim↙(∆t→0)(∆υ↖(→))/(∆t)=υ↖(→)_t"$
Los componentes $a↖(→) (a_x, a_y, a_z)$ son iguales, respectivamente:
$a_x=υ_x";a_y=υ_y";a_z=υ_z"$
La aceleracion, como el cambio de velocidad, se dirige hacia la concavidad de la trayectoria y se puede descomponer en dos componentes: tangencial- tangencialmente a la trayectoria del movimiento - y normal- perpendicular a la trayectoria.

De acuerdo con esto, la proyección de la aceleración $а_х$ sobre la tangente a la trayectoria se llama tangente, o tangencial aceleración, proyección $a_n$ sobre la normal - normal, o aceleración centrípeta.
La aceleración tangencial determina la cantidad de cambio en el valor numérico de la velocidad:
$a_t=lim↙(∆t→0)(∆υ)/(∆t)$
La aceleración normal o centrípeta caracteriza el cambio en la dirección de la velocidad y está determinada por la fórmula:
donde R es el radio de curvatura de la trayectoria en su punto correspondiente.
El módulo de aceleración está determinado por la fórmula:
$a=√(a_t^2+a_n^2)$
En el movimiento rectilíneo, la aceleración total $a$ es igual a la tangencial $a=a_t$, ya que la centrípeta $a_n=0$.
La unidad SI de aceleración es la aceleración a la que la velocidad de un cuerpo cambia en 1 m/s por cada segundo. Esta unidad se denota 1 m/s 2 y se llama “metro por segundo al cuadrado”.
Movimiento lineal uniforme
El movimiento de un punto se llama uniforme si recorre distancias iguales en períodos de tiempo iguales.
Por ejemplo, si un automóvil recorre 20 km cada cuarto de hora (15 minutos), 40 km cada media hora (30 minutos), 80 km cada hora (60 minutos), etc., ese movimiento se considera uniforme. Con movimiento uniforme, el valor numérico (módulo) de la velocidad del punto $υ$ es un valor constante:
$υ=|υ↖(→)|=const$
El movimiento uniforme puede ocurrir tanto a lo largo de una trayectoria curva como rectilínea.
La ley del movimiento uniforme de un punto se describe mediante la ecuación:
donde $s$ es la distancia medida a lo largo del arco de la trayectoria desde un cierto punto de la trayectoria tomado como origen; $t$ - hora de un punto del camino; $s_0$ - valor de $s$ en el momento inicial $t=0$.
El camino recorrido por un punto en el tiempo $t$ está determinado por el término $υt$.
Movimiento lineal uniforme- este es un movimiento en el que un cuerpo se mueve con una velocidad constante en magnitud y dirección:
$υ↖(→)=const$
La velocidad del movimiento rectilíneo uniforme es un valor constante y se puede definir como la relación entre el movimiento de un punto y el período de tiempo durante el cual ocurrió este movimiento:
$υ↖(→)=(∆r↖(→))/(∆t)$
Módulo de esta velocidad
$υ=(|∆r↖(→)|)/(∆t)$
en significado, es la distancia $s=|∆r↖(→)|$ recorrida por el punto durante el tiempo $∆t$.
La velocidad de un cuerpo en movimiento rectilíneo uniforme es una cantidad igual a la relación entre el camino $s$ y el tiempo durante el cual se recorre este camino:
El desplazamiento durante el movimiento lineal uniforme (a lo largo del eje X) se puede calcular mediante la fórmula:
donde $υ_x$ es la proyección de la velocidad sobre el eje X. Por tanto, la ley del movimiento uniforme rectilíneo tiene la forma:
Si en el momento inicial $x_0=0$, entonces
La gráfica de velocidad versus tiempo es una línea recta paralela al eje x, y la distancia recorrida es el área bajo esta línea recta.

La gráfica de la trayectoria en función del tiempo es una línea recta, cuyo ángulo de inclinación con respecto al eje del tiempo $Ot$ es mayor cuanto mayor es la velocidad del movimiento uniforme. La tangente de este ángulo es igual a la velocidad.
Sabemos que todos los cuerpos se atraen entre sí. En particular, la Luna, por ejemplo, se siente atraída por la Tierra. Pero surge la pregunta: si la Luna se siente atraída por la Tierra, ¿por qué gira alrededor de ella en lugar de caer hacia la Tierra?
Para responder a esta pregunta, es necesario considerar los tipos de movimiento de los cuerpos. Ya sabemos que el movimiento puede ser uniforme y desigual, pero existen otras características del movimiento. En particular, según la dirección, se distinguen movimientos rectilíneos y curvilíneos.
Movimiento en línea recta
Se sabe que un cuerpo se mueve bajo la influencia de una fuerza que se le aplica. Puedes hacer un experimento sencillo que muestre cómo la dirección del movimiento de un cuerpo dependerá de la dirección de la fuerza que se le aplica. Para hacer esto, necesitará un objeto pequeño arbitrario, un cordón de goma y un soporte horizontal o vertical.
Ata el cordón por un extremo al soporte. En el otro extremo del cordón adjuntamos nuestro objeto. Ahora bien, si tiramos de nuestro objeto una cierta distancia y luego lo soltamos, veremos como comienza a moverse en dirección al soporte. Su movimiento es provocado por la fuerza elástica de la cuerda. Así es como la Tierra atrae todos los cuerpos que se encuentran en su superficie, así como los meteoritos que vuelan desde el espacio.
Sólo que en lugar de la fuerza elástica actúa la fuerza de atracción. Ahora tomemos nuestro objeto con una banda elástica y empujémoslo no en la dirección de acercamiento o alejamiento del soporte, sino a lo largo de él. Si el objeto no estuviera asegurado, simplemente saldría volando. Pero como está sujeta por una cuerda, la bola, moviéndose hacia un lado, estira ligeramente la cuerda, lo que la tira hacia atrás, y la bola cambia ligeramente de dirección hacia el soporte.
Movimiento curvilíneo en círculo.
Esto sucede en todo momento; como resultado, la pelota no se mueve a lo largo de la trayectoria original, pero tampoco directamente hacia el soporte. La pelota se moverá alrededor del soporte formando un círculo. La trayectoria de su movimiento será curvilínea. Así es como la Luna se mueve alrededor de la Tierra sin caer sobre ella.
Así es como la gravedad terrestre captura los meteoritos que vuelan cerca de la Tierra, pero no directamente hacia ella. Estos meteoritos se convierten en satélites de la Tierra. Además, el tiempo que permanecerán en órbita depende de cuál fue su ángulo de movimiento inicial con respecto a la Tierra. Si su movimiento fue perpendicular a la Tierra, entonces pueden permanecer en órbita indefinidamente. Si el ángulo es inferior a 90°, se moverán en espiral descendente y caerán gradualmente al suelo.
Movimiento circular con velocidad de módulo constante.
Otro punto a tener en cuenta es que la velocidad del movimiento curvilíneo alrededor de un círculo varía en dirección, pero tiene el mismo valor. Y esto significa que el movimiento en círculo con una velocidad absoluta constante se produce uniformemente acelerado.
Dado que la dirección del movimiento cambia, significa que el movimiento se produce con aceleración. Y dado que cambia igualmente en cada momento del tiempo, el movimiento se acelerará uniformemente. Y la fuerza de gravedad es la fuerza que provoca una aceleración constante.
La Luna se mueve alrededor de la Tierra precisamente por esto, pero si de repente el movimiento de la Luna cambia, por ejemplo, un meteorito muy grande choca contra ella, es muy posible que abandone su órbita y caiga a la Tierra. Sólo nos queda esperar que este momento nunca llegue. Así que va.