The elastic force of the spring. Hooke's Law in Mathematical Form

Read also
Instructions
Attach a dynamometer to the body and pull it, deforming the body. The force that the dynamometer will show will be equal in magnitude to the elastic force acting on the body. Find the stiffness coefficient using Hooke, which says that the elastic force is directly proportional to its elongation and is directed in the direction opposite to the deformation. Calculate the stiffness coefficient by dividing the value of the force F by the elongation of the body x, which is measured with a ruler or tape k=F/x. To find the elongation of a deformed body, subtract the length of the deformed body from its original length. Stiffness coefficient in N/m.
If you don’t have a dynamometer, hang a load of known mass from the deformable body. Make sure that the body deforms elastically and does not collapse. In this case, the weight of the load will be equal to the elastic force acting on the body, the stiffness coefficient of which must be found, for example, . Calculate the stiffness coefficient by dividing the product of mass m and acceleration free fall g≈9.81 m/s² for body elongation x, k=m g/x. Measure the elongation using the method proposed in the previous one.
Example. Under a load of 3 kg, a spring 20 cm long becomes 26 cm, determine it. First find the spring extension in . To do this, from the length of the elongated spring, subtract its length in the normal state x=26-20=6 cm=0.06 m. Calculate the stiffness using the appropriate formula k=m g/x=3 9.81/0.06≈500 N /m.
And now some tips. To reduce rigidity water in your , add distilled or pure rainwater, use specialty plants such as elodea and hornwort. In addition, the water can be frozen or boiled well. In the first case, it is poured into a low basin and exposed to the cold. As soon as it freezes to half the container, the ice is broken through and, once melted, used. In the second, water is boiled in an enamel bowl for an hour, after which it is allowed to cool and two-thirds of the “top” is used. water.
Video on the topic
As a result of deformation physical body There is always a force that counteracts it, trying to return the body to its original position. Define this force elasticity in the simplest case it is possible according to Hooke's law.

Instructions
Force elasticity, acting on a deformed body, arises as a consequence of the electromagnetic interaction between its atoms. Exist different kinds deformations: / stretching, shear, bending. Under the influence of external forces, different parts of the body move differently, hence the distortion and force elasticity, which is directed towards the previous state.
Tensile/compressive deformation by the direction of an external force along the axis of an object. It can be a rod, a spring, or another body that has a long shape. When distorted, the cross section changes, and the force elasticity is proportional to the mutual displacement of body particles: Fcontrol = -k ∆x.
This is called Hooke's law, but it does not always apply, but only for relatively small values of ∆x. The value k is called stiffness and is expressed in N/m. This coefficient depends on source material body, as well as shape and size, it is proportional to the cross section.
During shear deformation, the volume of the body does not change, but its layers change relative to each other. Force elasticity equal to the product of the coefficient elasticity with a shift that is directly dependent on cross section body, by the angle between the axis and the tangent in the direction of which the external force acts: Fcontrol = D α.
Elastic forces and deformations
Definition 1
The force that arises in a body as a result of its deformation and tends to return it to its initial state is called the elastic force.
All bodies material world are subject to various types of deformations. Deformations arise due to movement and, as a consequence, changes in the position of body particles relative to each other. According to the degree of reversibility we can distinguish:
- elastic, or reversible deformations;
- plastic (residual) or irreversible deformations.
In cases where a body, upon completion of the action of forces leading to deformation, restores its original parameters, the deformation is called elastic.
It is worth noting that during elastic deformation, the effect of external force on the body does not exceed the elastic limit. Thus, elastic forces compensate for the external influence on the body.
Otherwise, the deformation is plastic or residual. A body subjected to an impact of this nature does not restore its original size and shape.
Elastic forces arising in bodies are not able to completely balance the forces causing plastic deformation.
In general, a number of simple deformations are distinguished:
- stretching (compression);
- bend;
- shift;
- torsion.
As a rule, deformations are often a combination of several types of impact presented, which makes it possible to reduce all deformations to the two most common types, namely tension and shear.
Characteristics of elastic forces
The modulus of elastic force acting per unit area is a physical quantity called stress (mechanical).
Mechanical stress, depending on the direction of application of force, can be:
- normal (directed normal to the surface, $σ$);
- tangential (directed tangent to the surface, $τ$).
Note 1
The degree of deformation is characterized by a quantitative measure - relative deformation.
So, for example, the relative change in the length of the rod can be described by the formula:
$ε=\frac(\Delta l)(l)$,
and relative longitudinal tension(compression):
$ε’=\frac(\Delta d)(d)$, where:
$l$ is the length, and $d$ is the diameter of the rod.
Deformations $ε$ and $ε’$ occur simultaneously and have opposite signs, due to the fact that when stretched, the change in the length of the body is positive, and the change in diameter is negative; in cases with compression of the body, the signs change to the opposite. Their relationship is described by the formula:
Here $μ$ is Poisson's ratio, depending on the properties of the material.
Hooke's law
By their nature, elastic forces are electromagnetic, not fundamental forces, and, therefore, they are described by approximate formulas.
Thus, it has been empirically established that for small deformations the relative elongation and stress are proportional, or
Here $E$ is the proportionality coefficient, also called Young's modulus. It takes on a value at which the relative elongation is equal to unity. Young's modulus is measured in newtons per square meter(pascals).
According to Hooke's law, the elongation of a rod during elastic deformation is proportional to the force acting on the rod, or:
$F=\frac(ES)(l)\Delta l=k\Delta l$
The value $k$ is called the elasticity coefficient.
Deformation solids is described by Hooke's law only up to the limit of proportionality. With increasing stress, the deformation ceases to be linear, but until the elastic limit is reached, residual deformations do not occur. Thus, Hooke's Law is valid exclusively for elastic deformations.
Plastic deformations
With a further increase in the acting forces, residual deformations occur.
Definition 2
Meaning mechanical stress, at which noticeable residual deformation occurs, is called the yield stress ($σт$).
Further, the degree of deformation increases without increasing stress until the ultimate strength ($σр$) is reached, when the body is destroyed. If we graphically depict the return of the body to its original state, then the area between the points $σт$ and $σр$ will be called the yield region (plastic deformation region). Depending on the size of this area, all materials are divided into viscous, in which the yield area is significant, and brittle, in which the yield area is minimal.
Note that previously we considered the influence of forces applied in the direction of the normal to the surface. If external forces were applied tangentially, shear deformation occurs. In this case, a tangential stress arises at each point of the body, determined by the modulus of force per unit area, or:
$τ=\frac(F)(S)$.
The relative shift, in turn, can be calculated using the formula:
$γ=\frac(1)(G)τ$, where $G$ is the shear modulus.
The shear modulus takes the tangential stress value at which the shear value is equal to unity; $G$ is measured in the same way as voltage, in pascals.
Hooke's law was discovered in the 17th century by the Englishman Robert Hooke. This discovery about the stretching of a spring is one of the laws of elasticity theory and plays an important role in science and technology.
Definition and formula of Hooke's law
The formulation of this law is as follows: the elastic force that appears at the moment of deformation of a body is proportional to the elongation of the body and is directed opposite to the movement of particles of this body relative to other particles during deformation.
The mathematical notation of the law looks like this:

Rice. 1. Formula of Hooke's law
Where Fupr– accordingly, the elastic force, x– elongation of the body (the distance by which the original length of the body changes), and k– proportionality coefficient, called body rigidity. Force is measured in Newtons, and elongation of a body is measured in meters.
To reveal the physical meaning of stiffness, you need to substitute the unit in which elongation is measured in the formula for Hooke’s law - 1 m, having previously obtained an expression for k.

Rice. 2. Body stiffness formula
This formula shows that the stiffness of a body is numerically equal to the elastic force that occurs in the body (spring) when it is deformed by 1 m. It is known that the stiffness of a spring depends on its shape, size and the material from which the body is made.
Elastic force
Now that we know what formula expresses Hooke’s law, it is necessary to understand its basic value. The main quantity is the elastic force. It appears at a certain moment when the body begins to deform, for example, when a spring is compressed or stretched. It is sent to reverse side from gravity. When the elastic force and the force of gravity acting on the body become equal, the support and the body stop.
Deformation is an irreversible change that occurs in the size of the body and its shape. They are associated with the movement of particles relative to each other. If a person sits in easy chair, then the chair will become deformed, that is, its characteristics will change. It happens different types: bending, stretching, compression, shear, torsion.
Since the elastic force is related in origin to electromagnetic forces, you should know that it arises due to the fact that molecules and atoms - the smallest particles that make up all bodies - attract and repel each other. If the distance between the particles is very small, then they are affected by the repulsive force. If this distance is increased, then the force of attraction will act on them. Thus, the difference between attractive and repulsive forces manifests itself in elastic forces.
The elastic force includes the ground reaction force and body weight. The strength of the reaction is of particular interest. This is the force that acts on a body when it is placed on any surface. If the body is suspended, then the force acting on it is called the tension force of the thread.
Features of elastic forces
As we have already found out, the elastic force arises during deformation, and it is aimed at restoring the original shapes and sizes strictly perpendicular to the deformed surface. Elastic forces also have a number of features.
- they occur during deformation;
- they appear in two deformable bodies simultaneously;
- they are perpendicular to the surface in relation to which the body is deformed.
- they are opposite in direction to the displacement of body particles.
Application of the law in practice
Hooke's law is applied both in technical and high-tech devices, and in nature itself. For example, elastic forces are found in watch mechanisms, in shock absorbers in transport, in ropes, rubber bands, and even in human bones. The principle of Hooke's law underlies the dynamometer, a device used to measure force.
The word “power” is so comprehensive that giving it a clear concept is an almost impossible task. The variety from muscle strength to mind strength does not cover the entire spectrum of concepts included in it. Force, considered as a physical quantity, has a clearly defined meaning and definition. The force formula specifies a mathematical model: the dependence of force on basic parameters.
The history of the study of forces includes the determination of dependence on parameters and experimental proof of the dependence.
Power in Physics
Force is a measure of the interaction of bodies. The mutual action of bodies on each other fully describes the processes associated with changes in speed or deformation of bodies.
As a physical quantity, force has a unit of measurement (in the SI system - Newton) and a device for measuring it - a dynamometer. The principle of operation of the force meter is based on comparing the force acting on the body with the elastic force of the dynamometer spring.
A force of 1 newton is taken to be the force under the influence of which a body weighing 1 kg changes its speed by 1 m in 1 second.
Strength as defined:
- direction of action;
- application point;
- module, absolute value.
When describing interaction, be sure to indicate these parameters.
Types of natural interactions: gravitational, electromagnetic, strong, weak. Gravitational universal gravity with its variety - gravity) exist due to the influence of gravitational fields surrounding any body with mass. The study of gravitational fields has not yet been completed. It is not yet possible to find the source of the field.
A larger number of forces arise due to the electromagnetic interaction of the atoms that make up a substance.
Pressure force
When a body interacts with the Earth, it exerts pressure on the surface. The force of which has the form: P = mg, is determined by body mass (m). Gravity acceleration (g) has different meanings at different latitudes of the Earth.
The vertical pressure force is equal in magnitude and opposite in direction to the elastic force arising in the support. The formula of force changes depending on the movement of the body.
Change in body weight
The action of a body on support due to interaction with the Earth is often called body weight. Interestingly, the amount of body weight depends on the acceleration of movement in the vertical direction. In the case where the direction of acceleration is opposite to the acceleration of gravity, an increase in weight is observed. If the acceleration of the body coincides with the direction of free fall, then the weight of the body decreases. For example, being in an ascending elevator, at the beginning of the ascent a person feels an increase in weight for some time. There is no need to say that its mass changes. At the same time, we separate the concepts of “body weight” and its “mass”.
Elastic force
When the shape of a body changes (its deformation), a force appears that tends to return the body to its original shape. This force was given the name "elasticity force". It arises as a result of the electrical interaction of the particles that make up the body.

Let's consider the simplest deformation: tension and compression. Stretching is accompanied by an increase linear dimensions bodies, compression - by their reduction. The quantity characterizing these processes is called body elongation. Let's denote it "x". The elastic force formula is directly related to elongation. Each body undergoing deformation has its own geometric and physical parameters. The dependence of the elastic resistance to deformation on the properties of the body and the material from which it is made is determined by the elasticity coefficient, let's call it rigidity (k).
The mathematical model of elastic interaction is described by Hooke's law.
The force arising during deformation of the body is directed against the direction of displacement of individual parts of the body and is directly proportional to its elongation:
- F y = -kx (in vector notation).
The “-” sign indicates the opposite direction of deformation and force.
In scalar form there is no negative sign. The elastic force, the formula of which is next view F y = kx, used only for elastic deformations.
Interaction of magnetic field with current
Influence magnetic field for direct current is described. In this case, the force with which the magnetic field acts on a conductor with current placed in it is called the Ampere force.
The interaction of the magnetic field with causes force manifestation. Ampere's force, the formula of which is F = IBlsinα, depends on (B), the length of the active part of the conductor (l), (I) in the conductor and the angle between the direction of the current and the magnetic induction.

Thanks to the last dependence, it can be argued that the vector of action of the magnetic field can change when the conductor is rotated or the direction of the current changes. The left hand rule allows you to establish the direction of action. If left hand positioned so that the magnetic induction vector enters the palm, four fingers are directed along the current in the conductor, then bent 90 ° thumb will show the direction of action of the magnetic field.
Mankind has found applications for this effect, for example, in electric motors. The rotation of the rotor is caused by the magnetic field created by powerful electromagnet. The force formula allows you to judge the possibility of changing engine power. With increasing current or field strength torque increases, which leads to an increase in engine power.
Particle trajectories
The interaction of a magnetic field with a charge is widely used in mass spectrographs in the study of elementary particles.
The action of the field in this case causes the appearance of a force called the Lorentz force. When a charged particle moving at a certain speed enters a magnetic field, the formula of which is F = vBqsinα, causes the particle to move in a circle.
In this mathematical model, v is the particle velocity modulus, electric charge of which - q, B - magnetic field induction, α - angle between the directions of speed and magnetic induction.

The particle moves in a circle (or arc of a circle), since the force and speed are directed at an angle of 90 ° to each other. Changing direction linear speed causes acceleration to occur.
The rule of the left hand, discussed above, also occurs when studying the Lorentz force: if the left hand is positioned in such a way that the magnetic induction vector enters the palm, four fingers extended in a line are directed along the speed of a positively charged particle, then bent by 90 ° the thumb will indicate the direction of the force.

Plasma problems
The interaction of a magnetic field and matter is used in cyclotrons. Problems associated with the laboratory study of plasma do not allow it to be kept in closed vessels. High can only exist when high temperatures. Plasma can be kept in one place in space using magnetic fields, twisting the gas in the form of a ring. Controlled ones can also be studied by twisting high-temperature plasma into a cord using magnetic fields.
An example of the action of a magnetic field in natural conditions on ionized gas - Aurora. This majestic spectacle is observed above the Arctic Circle at an altitude of 100 km above the earth's surface. The mysterious colorful glow of the gas could only be explained in the 20th century. The earth's magnetic field near the poles cannot prevent penetration solar wind in atmosphere. The most active radiation, directed along magnetic induction lines, causes ionization of the atmosphere.

Phenomena associated with charge movement
Historically, the main quantity characterizing the flow of current in a conductor is called current strength. It is interesting that this concept has nothing to do with force in physics. The current strength, the formula of which includes the charge flowing per unit time through the cross section of the conductor, has the form:
- I = q/t, where t is the flow time of charge q.
In fact, current is the amount of charge. Its unit of measurement is Ampere (A), as opposed to N.
Definition of work of force
The force exerted on a substance is accompanied by the performance of work. The work of a force is a physical quantity numerically equal to the product of the force and the displacement passed under its action and the cosine of the angle between the directions of force and displacement.
The required work of force, the formula of which is A = FScosα, includes the magnitude of the force.
The action of a body is accompanied by a change in the speed of the body or deformation, which indicates simultaneous changes in energy. The work done by a force directly depends on the magnitude.
Forceelasticity- this is the power which occurs when the body is deformed and which seeks to restore the previous shape and size of the body.
The elastic force arises as a result of electromagnetic interaction between the molecules and atoms of a substance.
The simplest version of deformation can be considered using the example of compression and extension of a spring.
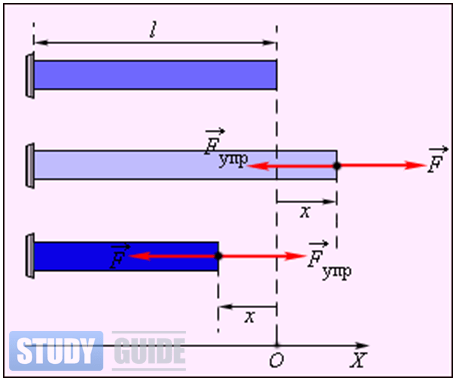
In this picture (x>0) — tensile deformation; (x< 0) — compression deformation. (Fx) - external force.
In the case when the deformation is the most insignificant, i.e. small, the elastic force is directed in the direction that is opposite to the direction of the moving particles of the body and is proportional to the deformation of the body:
Fx = Fcontrol = - kx
This relation is used to express Hooke's law, which was established experimental method. Coefficient k is commonly called body rigidity. The stiffness of a body is measured in newtons per meter (N/m) and depends on the size and shape of the body, as well as on the materials from which the body is composed.
In physics, Hooke's law for determining the compression or tension deformation of a body is written in a completely different form. IN in this case relative deformation is called

Robert Hooke
(18.07.1635 - 03.03.1703)
English naturalist, encyclopedist
attitude ε = x/l . At the same time, stress is the cross-sectional area of a body after relative deformation:
σ = F / S = -Fcontrol / S
In this case, Hooke’s law is formulated as follows: the stress σ is proportional to the relative deformation ε . In this formula the coefficient E called Young's modulus. This module does not depend on the shape of the body and its dimensions, but at the same time, it directly depends on the properties of the materials from which the body consists. For various materials Young's modulus fluctuates over a fairly wide range. For example, for rubber E ≈ 2·106 N/m2, and for steel E ≈ 2·1011 N/m2 (i.e. five orders of magnitude more).
It is quite possible to generalize Hooke's law in cases where more complex deformations occur. For example, consider bending deformation. Let's consider a rod that rests on two supports and has a significant deflection.

From the side of the support (or suspension), an elastic force acts on this body; this is the support reaction force. The reaction force of the support when the bodies come into contact will be directed strictly perpendicular to the contact surface. This force is usually called the normal pressure force.
Let's consider the second option. The way the body lies motionless horizontal table. Then the reaction of the support balances the force of gravity and it is directed vertically upward. Moreover, body weight is considered the force with which the body acts on the table.