Rectilinear and curvilinear movement. Linear and circular motion
6. Curvilinear movement. Angular displacement, angular velocity and acceleration of a body. Path and displacement during curvilinear movement of a body.
Curvilinear movement– this is a movement whose trajectory is a curved line (for example, a circle, ellipse, hyperbola, parabola). An example of curvilinear motion is the movement of planets, the end of a clock hand along a dial, etc. In general curvilinear speed changes in magnitude and direction.
Curvilinear motion of a material point is considered uniform motion if the module speed constant (for example, uniform motion in a circle), and uniformly accelerated if the module and direction speed changes (for example, the movement of a body thrown at an angle to the horizontal).
Rice. 1.19. Trajectory and vector of movement during curvilinear movement.
When moving along a curved path displacement vector directed along the chord (Fig. 1.19), and l- length trajectories . The instantaneous speed of the body (that is, the speed of the body at a given point of the trajectory) is directed tangentially at the point of the trajectory where the moving body is currently located (Fig. 1.20).
 Rice. 1.20. Instantaneous speed during curved motion.
Rice. 1.20. Instantaneous speed during curved motion.
Curvilinear motion is always accelerated motion. That is acceleration during curved motion is always present, even if the speed module does not change, but only the direction of speed changes. The change in speed per unit time is tangential acceleration :
 or
or 
Where v τ ,v 0 – velocity values at the moment of time t 0 +Δt And t 0 respectively.
Tangential acceleration at a given point of the trajectory, the direction coincides with the direction of the speed of movement of the body or is opposite to it.
Normal acceleration is the change in speed in direction per unit time:

Normal acceleration directed along the radius of curvature of the trajectory (towards the axis of rotation). Normal acceleration is perpendicular to the direction of velocity.
Centripetal acceleration– this is the normal acceleration during uniform motion in a circle.
Total acceleration during uniform curvilinear motion of a body equals:

The movement of a body along a curved path can be approximately represented as movement along the arcs of certain circles (Fig. 1.21).
 Rice. 1.21. Movement of a body during curvilinear motion.
Rice. 1.21. Movement of a body during curvilinear motion.
Curvilinear movement
Curvilinear movements– movements whose trajectories are not straight, but curved lines. Planets and river waters move along curvilinear trajectories.
Curvilinear motion is always motion with acceleration, even if the absolute value of the velocity is constant. Curvilinear motion with constant acceleration always occurs in the plane in which the acceleration vectors and initial velocities of the point are located. In the case of curvilinear motion with constant acceleration in the plane xOy projections v x And v y its speed on the axis Ox And Oy and coordinates x And y points at any time t determined by formulas
![]()
![]()
A special case of curvilinear motion is circular motion. Circular motion, even uniform, is always accelerated motion: the velocity module is always directed tangentially to the trajectory, constantly changing direction, so circular motion always occurs with centripetal acceleration where r– radius of the circle.
The acceleration vector when moving in a circle is directed towards the center of the circle and perpendicular to the velocity vector.
In curvilinear motion, acceleration can be represented as the sum of normal and tangential components:
Normal (centripetal) acceleration is directed towards the center of curvature of the trajectory and characterizes the change in speed in the direction:
v – instantaneous speed value, r– radius of curvature of the trajectory at a given point.
Tangential (tangential) acceleration is directed tangentially to the trajectory and characterizes the change in speed modulo.
The total acceleration with which a material point moves is equal to:

In addition to centripetal acceleration, the most important characteristics of uniform circular motion are the period and frequency of revolution.
Circulation period- this is the time during which the body completes one revolution .
The period is indicated by the letter T(c) and is determined by the formula:
Where t- circulation time, P- the number of revolutions completed during this time.
Frequency- this is a quantity numerically equal to the number of revolutions completed per unit of time.
Frequency is denoted by a Greek letter (nu) and is found using the formula:
The frequency is measured in 1/s.
Period and frequency are mutually inverse quantities:
If a body moves in a circle with speed v, makes one revolution, then the distance traveled by this body can be found by multiplying the speed v for the time of one revolution:
l = vT. On the other hand, this path is equal to the circumference of the circle 2π r. That's why
vT = 2π r,
![]()
Where w(s -1) - angular velocity.
At a constant rotation frequency, centripetal acceleration is directly proportional to the distance from the moving particle to the center of rotation.
Angular velocity (w) – a value equal to the ratio of the angle of rotation of the radius at which the rotating point is located to the period of time during which this rotation occurred:
![]() .
.
Relationship between linear and angular speeds:
The movement of a body can be considered known only when it is known how each point moves. The simplest motion of solid bodies is translational. Progressive is the motion of a rigid body in which any straight line drawn in this body moves parallel to itself.
Depending on the shape of the trajectory, movement can be divided into rectilinear and curvilinear. Most often you encounter curvilinear movements when the trajectory is represented as a curve. An example of this type of motion is the path of a body thrown at an angle to the horizon, the movement of the Earth around the Sun, planets, and so on.
Picture 1 . Trajectory and movement in curved motion
Definition 1Curvilinear movement called a movement whose trajectory is a curved line. If a body moves along a curved path, then the displacement vector s → is directed along the chord, as shown in Figure 1, and l is the length of the path. The direction of the instantaneous speed of the body moves along a tangent at the same point of the trajectory where the moving object is currently located, as shown in Figure 2.

Figure 2. Instantaneous speed during curved motion
Definition 2
Curvilinear motion of a material point called uniform when the velocity module is constant (circular motion), and uniformly accelerated when the direction and velocity module are changing (movement of an thrown body).
Curvilinear motion is always accelerated. This is explained by the fact that even with an unchanged velocity module and a changed direction, acceleration is always present.
In order to study the curvilinear motion of a material point, two methods are used.
The path is divided into separate sections, at each of which it can be considered straight, as shown in Figure 3.
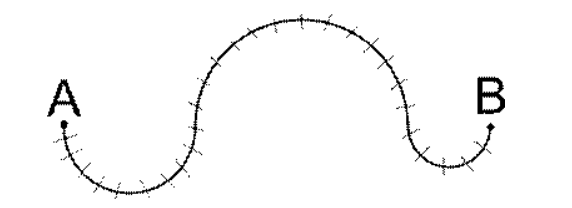
Figure 3. Partitioning curvilinear motion into translational ones
Now the law of rectilinear motion can be applied to each section. This principle is allowed.
The most convenient solution method is considered to represent the path as a set of several movements along circular arcs, as shown in Figure 4. The number of partitions will be much less than in the previous method, in addition, the movement along the circle is already curvilinear.

Figure 4. Partitioning curvilinear motion into motion along circular arcs
Note 1
To record curvilinear movement, you must be able to describe movement in a circle, and represent arbitrary movement in the form of sets of movements along the arcs of these circles.
The study of curvilinear motion includes the compilation of a kinematic equation that describes this motion and allows one to determine all the characteristics of the motion based on the available initial conditions.
Example 1
Given a material point moving along a curve, as shown in Figure 4. The centers of circles O 1, O 2, O 3 are located on the same straight line. Need to find displacement
s → and path length l while moving from point A to B.
Solution
By condition, we have that the centers of the circle belong to the same straight line, hence:
s → = R 1 + 2 R 2 + R 3 .
Since the trajectory of movement is the sum of semicircles, then:
l ~ A B = π R 1 + R 2 + R 3 .
Answer: s → = R 1 + 2 R 2 + R 3, l ~ A B = π R 1 + R 2 + R 3.
Example 2
The dependence of the distance traveled by the body on time is given, represented by the equation s (t) = A + B t + C t 2 + D t 3 (C = 0.1 m / s 2, D = 0.003 m / s 3). Calculate after what period of time after the start of movement the acceleration of the body will be equal to 2 m / s 2
Solution

Answer: t = 60 s.
If you notice an error in the text, please highlight it and press Ctrl+Enter
Mechanical movement. Relativity of mechanical motion. Reference system
Mechanical motion is understood as a change over time in the relative position of bodies or their parts in space: for example, the movement of celestial bodies, vibrations of the earth's crust, air and sea currents, the movement of aircraft and vehicles, machines and mechanisms, deformation of structural elements and structures, movement liquids and gases, etc.
Relativity of mechanical motion
We have been familiar with the relativity of mechanical motion since childhood. So, sitting on a train and watching a train, which was previously standing on a parallel track, start moving, we often cannot determine which of the trains actually started moving. And here we should immediately clarify: move relative to what? Regarding the Earth, of course. Because we began to move relative to the neighboring train, regardless of which of the trains began its movement relative to the Earth.
The relativity of mechanical motion lies in the relativity of the speeds of movement of bodies: the speeds of bodies relative to different reference systems will be different (the speed of a person moving in a train, ship, airplane will differ both in magnitude and in direction, depending on the reference system in which these speeds are determined: in a reference frame associated with a moving vehicle, or with a stationary Earth).
The trajectories of body movement in different reference systems will also be different. For example, drops of rain falling vertically onto the ground will leave a mark in the form of oblique streams on the window of a moving train. In the same way, any point on the rotating propeller of a flying airplane or a helicopter descending to the ground describes a circle relative to the airplane and a much more complex curve - a helical line relative to the Earth. Thus, with mechanical movement, the trajectory of movement is also relative.
The path traveled by the body also depends on the frame of reference. Returning to the same passenger sitting on the train, we understand that the path traveled by him relative to the train during the trip is equal to zero (if he did not move around the carriage) or, in any case, much less than the path he traveled together with the train relative to the Earth. Thus, with mechanical motion, the path is also relative.
The awareness of the relativity of mechanical motion (i.e., that the movement of a body can be considered in different reference systems) led to the transition from the geocentric system of the world of Ptolemy to the heliocentric system of Copernicus. Ptolemy, following the movement of the Sun and stars in the sky observed since ancient times, placed the stationary Earth in the center of the Universe with the rest of the celestial bodies rotating around it. Copernicus believed that the Earth and other planets rotate around the Sun and at the same time around their axes.
Thus, a change in the reference system (the Earth - in the geocentric system of the world and the Sun - in the heliocentric system) led to a much more progressive heliocentric system, which makes it possible to solve many scientific and applied problems of astronomy and change humanity’s views on the Universe.
The coordinate system $X, Y, Z$, the reference body with which it is associated, and the device for measuring time (clock) form a reference system relative to which the movement of the body is considered.

Reference body called the body relative to which the change in the position of other bodies in space is considered.
The reference system can be chosen arbitrarily. In kinematic studies, all reference systems are equal. In dynamics problems, you can also use any arbitrarily moving reference frames, but inertial reference frames are most convenient, since in them the characteristics of motion have a simpler form.
Material point
A material point is an object of negligible size that has mass.
The concept of “material point” is introduced to describe (using mathematical formulas) the mechanical motion of bodies. This is done because it is easier to describe the movement of a point than a real body, whose particles can also move at different speeds (for example, during rotation of the body or deformations).
If a real body is replaced by a material point, then the mass of this body is assigned to this point, but its dimensions are neglected, and at the same time the difference in the characteristics of the movement of its points (velocities, accelerations, etc.), if any, is neglected. In what cases can this be done?
Almost any body can be considered as a material point if the distances traveled by the points of the body are very large compared to its size.
For example, the Earth and other planets are considered material points when studying their movement around the Sun. In this case, differences in the movement of various points of any planet, caused by its daily rotation, do not affect the quantities describing the annual movement.
Consequently, if in the motion of a body under study one can neglect its rotation around an axis, such a body can be represented as a material point.
However, when solving problems related to the daily rotation of planets (for example, when determining the sunrise in different places on the surface of the globe), it makes no sense to consider the planet a material point, since the result of the problem depends on the size of this planet and the speed of movement of points on its surface.
It is legitimate to consider an airplane as a material point if it is necessary, for example, to determine the average speed of its movement on the way from Moscow to Novosibirsk. But when calculating the air resistance force acting on a flying airplane, it cannot be considered a material point, since the resistance force depends on the size and shape of the airplane.
If a body moves translationally, even if its dimensions are comparable to the distances it travels, this body can be considered as a material point (since all points of the body move the same way).
In conclusion, we can say: a body, the dimensions of which can be neglected in the conditions of the problem under consideration, can be considered a material point.
Trajectory
A trajectory is a line (or, as they say, a curve) that a body describes when moving relative to a selected body of reference.
It makes sense to talk about a trajectory only in the case when the body can be represented as a material point.
Trajectories can have different shapes. It is sometimes possible to judge the shape of a trajectory by the visible trace left by a moving body, for example, a flying airplane or a meteor streaking through the night sky.
The shape of the trajectory depends on the choice of reference body. For example, relative to the Earth, the trajectory of the Moon is a circle; relative to the Sun, it is a line of a more complex shape.

When studying mechanical motion, the Earth is usually considered as a body of reference.
Methods for specifying the position of a point and describing its movement
The position of a point in space is specified in two ways: 1) using coordinates; 2) using the radius vector.
The position of a point using coordinates is specified by three projections of the point $x, y, z$ on the axes of the Cartesian coordinate system $OX, OU, OZ$ associated with the reference body. To do this, from point A it is necessary to lower perpendiculars on the plane $YZ$ (coordinate $x$), $ХZ$ (coordinate $y$), $ХУ$ (coordinate $z$), respectively. It is written like this: $A(x, y, z)$. For a specific case, $(x=6, y=10.2, z= 4.5$), point $A$ is designated $A(6; 10; 4.5)$.

On the contrary, if specific values of the coordinates of a point in a given coordinate system are given, then to depict the point itself it is necessary to plot the coordinate values on the corresponding axes ($x$ to the $OX$ axis, etc.) and construct a parallelepiped on these three mutually perpendicular segments. Its vertex, opposite the origin of coordinates $O$ and lying on the diagonal of the parallelepiped, will be the desired point $A$.
If a point moves within a certain plane, then it is enough to draw two coordinate axes through the points selected on the reference body: $OX$ and $OU$. Then the position of the point on the plane is determined by two coordinates $x$ and $y$.

If a point moves along a straight line, it is enough to set one coordinate axis OX and direct it along the line of movement.
Setting the position of point $A$ using the radius vector is carried out by connecting point $A$ to the origin of coordinates $O$. The directed segment $OA = r↖(→)$ is called the radius vector.
Radius vector is a vector connecting the origin with the position of a point at an arbitrary moment in time.
A point is specified by a radius vector if its length (modulus) and direction in space are known, i.e., the values of its projections $r_x, r_y, r_z$ on the coordinate axes $OX, OY, OZ$, or the angles between the radius vector and coordinate axes. For the case of motion on a plane we have:
Here $r=|r↖(→)|$ is the module of the radius vector $r↖(→), r_x$ and $r_y$ are its projections on the coordinate axes, all three quantities are scalars; xzhu - coordinates of point A.
The last equations demonstrate the connection between the coordinate and vector methods of specifying the position of a point.
The vector $r↖(→)$ can also be decomposed into components along the $X$ and $Y$ axes, i.e., represented as the sum of two vectors:
$r↖(→)=r↖(→)_x+r↖(→)_y$
Thus, the position of a point in space is specified either by its coordinates or by the radius vector.
Ways to describe the movement of a point
In accordance with the methods of specifying coordinates, the movement of a point can be described: 1) by coordinate method; 2) vector method.
With the coordinate method of describing (or specifying) movement, the change in the coordinates of a point over time is written in the form of functions of all three of its coordinates versus time:
The equations are called kinematic equations of motion of a point, written in coordinate form. Knowing the kinematic equations of motion and initial conditions (i.e., the position of the point at the initial time), you can determine the position of the point at any time.
With the vector method of describing the movement of a point, the change in its position over time is given by the dependence of the radius vector on time:
$r↖(→)=r↖(→)(t)$
The equation is the equation of motion of a point, written in vector form. If it is known, then for any moment in time it is possible to calculate the radius vector of the point, i.e. determine its position (as in the case of the coordinate method). Thus, specifying three scalar equations is equivalent to specifying one vector equation.
For each case of motion, the form of the equations will be quite specific. If the trajectory of a point’s movement is a straight line, the movement is called rectilinear, and if it is a curve, it is called curvilinear.
Movement and path
Displacement in mechanics is a vector connecting the positions of a moving point at the beginning and at the end of a certain period of time.
The concept of a displacement vector is introduced to solve the problem of kinematics - to determine the position of a body (point) in space at a given moment in time, if its initial position is known.
In Fig. the vector $(М_1М_2)↖(-)$ connects two positions of a moving point - $М_1$ and $М_2$ at moments of time $t_1$ and $t_2$ respectively and, according to definition, is a displacement vector. If point $M_1$ is specified by the radius vector $r↖(→)_1$, and point $M_2$ is specified by the radius vector $r↖(→)_2$, then, as can be seen from the figure, the displacement vector is equal to the difference of these two vectors , i.e., the change in the radius vector over time $∆t=t_2-t_1$:
$∆r↖(→)=r↖(→)_2-r↖(→)_1$.
The addition of displacements (for example, on two adjacent sections of the trajectory) $∆r↖(→)_1$ and $∆r↖(→)_2$ is carried out according to the vector addition rule:
$∆r=∆r↖(→)_2+∆r↖(→)_1$
The path is the length of the trajectory section traveled by a material point in a given period of time. The magnitude of the displacement vector in the general case is not equal to the length of the path traveled by the point during the time $∆t$ (the trajectory can be curvilinear, and, in addition, the point can change the direction of movement).
The magnitude of the displacement vector is equal to the path only for rectilinear motion in one direction. If the direction of linear motion changes, the magnitude of the displacement vector is less than the path.
During curvilinear motion, the magnitude of the displacement vector is also less than the path, since the chord is always less than the length of the arc that it subtends.

Velocity of a material point
Speed characterizes the speed with which any changes occur in the world around us (the movement of matter in space and time). The movement of a pedestrian along the sidewalk, the flight of a bird, the propagation of sound, radio waves or light in the air, the flow of water from a pipe, the movement of clouds, the evaporation of water, the heating of an iron - all these phenomena are characterized by a certain speed.
In the mechanical movement of bodies, speed characterizes not only the speed, but also the direction of movement, i.e. vector quantity.
The speed $υ↖(→)$ of a point is the limit of the ratio of the movement $∆r↖(→)$ to the time interval $∆t$ during which this movement occurred, as $∆t$ tends to zero (i.e., the derivative $∆r↖(→)$ by $t$):
$υ↖(→)=(lim)↙(∆t→0)(∆r↖(→))/(∆t)=r↖(→)_1"$
The components of the velocity vector along the $X, Y, Z$ axes are determined similarly:
$υ↖(→)_x=(lim)↙(∆t→0)(∆x)/(∆t)=x"; υ_y=y"; υ_z=z"$
The concept of speed defined in this way is also called instantaneous speed. This definition of speed is valid for any type of movement - from curvilinear uneven to rectilinear uniform. When they talk about speed during uneven motion, it means instantaneous speed. The vector nature of speed directly follows from this definition, since moving- vector quantity. The instantaneous velocity vector $υ↖(→)$ is always directed tangentially to the motion trajectory. It indicates the direction in which the body would move if, from the moment of time $t$, the action of any other bodies on it ceased.

average speed
The average speed of a point is introduced to characterize uneven motion (i.e., motion with variable speed) and is determined in two ways.
1. The average speed of a point $υ_(av)$ is equal to the ratio of the entire path $∆s$ traversed by the body to the entire time of movement $∆t$:
$υ↖(→)_(avg)=(∆s)/(∆t)$
With this definition, the average speed is a scalar, since the distance traveled (distance) and time are scalar quantities.
This method of determination gives an idea of average speed of movement on the trajectory section (average ground speed).
2. The average speed of a point is equal to the ratio of the point’s movement to the period of time during which this movement occurred:
$υ↖(→)_(avg)=(∆r↖(→))/(∆t)$
The average speed of movement is a vector quantity.
For uneven curvilinear motion, such a definition of the average speed does not always make it possible to determine even approximately the real speeds along the path of the point’s movement. For example, if a point moved along a closed path for some time, then its displacement is equal to zero (but the speed was clearly different from zero). In this case, it is better to use the first definition of average speed.
In any case, you should distinguish between these two definitions of average speed and know which one you are talking about.

Law of addition of speeds
The law of addition of velocities establishes a connection between the values of the velocity of a material point relative to different reference systems moving relative to each other. In non-relativistic (classical) physics, when the speeds under consideration are small compared to the speed of light, Galileo’s law of addition of speeds is valid, which is expressed by the formula:
$υ↖(→)_2=υ↖(→)_1+υ↖(→)$
where $υ↖(→)_2$ and $υ↖(→)_1$ are the velocities of the body (point) relative to two inertial reference systems - a stationary reference frame $K_2$ and a reference frame $K_1$ moving at a speed $υ↖(→ )$ relative to $K_2$.
The formula can be obtained by adding the displacement vectors.
For clarity, let us consider the movement of a boat with a speed of $υ↖(→)_1$ relative to the river (reference frame $K_1$), the waters of which move with a speed of $υ↖(→)$ relative to the shore (reference frame $K_2$).

The displacement vectors of the boat relative to the water $∆r↖(→)_1$, the river relative to the shore $∆r↖(→)$ and the total displacement vector of the boat relative to the shore $∆r↖(→)_2$ are shown in Fig..

Mathematically:
$∆r↖(→)_2=∆r↖(→)_1+∆r↖(→)$
Dividing both sides of the equation by the time interval $∆t$, we get:
$(∆r↖(→)_2)/(∆t)=(∆r↖(→)_1)/(∆t)+(∆r↖(→))/(∆t)$
In the projections of the velocity vector on the coordinate axes, the equation has the form:
$υ_(2x)=υ_(1x)+υ_x,$
$υ_(2y)=υ_(1y)+υ_y.$
The velocity projections are added algebraically.
Relative speed
From the law of addition of velocities it follows that if two bodies move in the same reference frame with velocities $υ↖(→)_1$ and $υ↖(→)_2$, then the speed of the first body relative to the second $υ↖(→) _(12)$ is equal to the difference in the velocities of these bodies:
$υ↖(→)_(12)=υ↖(→)_1-υ↖(→)_2$
So, when bodies move in one direction (overtaking), the module of relative speed is equal to the difference in speeds, and when moving in the opposite direction - the sum of speeds.
Acceleration of a material point
Acceleration is a quantity characterizing the rate of change of speed. As a rule, the movement is uneven, that is, it occurs at a variable speed. In some parts of a body's trajectory, the speed may be greater, in others - less. For example, a train leaving a station moves faster and faster over time. Approaching the station, he, on the contrary, slows down.
Acceleration (or instantaneous acceleration) is a vector physical quantity equal to the limit of the ratio of the change in speed to the period of time during which this change occurred, as $∆t$ tends to zero, (i.e., the derivative of $υ↖(→)$ with respect to $ t$):
$a↖(→)=lim↙(∆t→0)(∆υ↖(→))/(∆t)=υ↖(→)_t"$
The components $a↖(→) (a_x, a_y, a_z)$ are equal, respectively:
$a_x=υ_x";a_y=υ_y";a_z=υ_z"$
Acceleration, like the change in speed, is directed towards the concavity of the trajectory and can be decomposed into two components - tangential- tangentially to the trajectory of movement - and normal- perpendicular to the trajectory.

In accordance with this, the projection of acceleration $а_х$ onto the tangent to the trajectory is called tangent, or tangential acceleration, projection $a_n$ onto the normal - normal, or centripetal acceleration.
Tangential acceleration determines the amount of change in the numerical value of speed:
$a_t=lim↙(∆t→0)(∆υ)/(∆t)$
Normal, or centripetal acceleration characterizes the change in the direction of speed and is determined by the formula:
where R is the radius of curvature of the trajectory at its corresponding point.
The acceleration module is determined by the formula:
$a=√(a_t^2+a_n^2)$
In rectilinear motion, the total acceleration $a$ is equal to the tangential one $a=a_t$, since the centripetal one $a_n=0$.
The SI unit of acceleration is the acceleration at which the speed of a body changes by 1 m/s for every second. This unit is denoted 1 m/s 2 and is called “meter per second squared”.
Uniform linear movement
The motion of a point is called uniform if it travels equal distances in any equal periods of time.
For example, if a car travels 20 km for every quarter hour (15 minutes), 40 km for every half hour (30 minutes), 80 km for every hour (60 minutes), etc., then such movement is considered uniform. With uniform motion, the numerical value (modulus) of the speed of the point $υ$ is a constant value:
$υ=|υ↖(→)|=const$
Uniform movement can occur both along a curved and rectilinear trajectory.
The law of uniform motion of a point is described by the equation:
where $s$ is the distance measured along the trajectory arc from a certain point on the trajectory taken as the origin; $t$ - time of a point on the way; $s_0$ - value of $s$ at the initial moment of time $t=0$.
The path traveled by a point in time $t$ is determined by the term $υt$.
Uniform linear movement- this is a movement in which a body moves with a constant speed in magnitude and direction:
$υ↖(→)=const$
The speed of uniform rectilinear motion is a constant value and can be defined as the ratio of the movement of a point to the period of time during which this movement occurred:
$υ↖(→)=(∆r↖(→))/(∆t)$
Module of this speed
$υ=(|∆r↖(→)|)/(∆t)$
in meaning, it is the distance $s=|∆r↖(→)|$ traveled by the point during the time $∆t$.
The speed of a body in uniform rectilinear motion is a quantity equal to the ratio of the path $s$ to the time during which this path is covered:
Displacement during linear uniform motion (along the X axis) can be calculated using the formula:
where $υ_x$ is the projection of velocity onto the X axis. Hence the law of rectilinear uniform motion has the form:
If at the initial moment of time $x_0=0$, then
The graph of speed versus time is a straight line parallel to the x-axis, and the distance traveled is the area under this straight line.

The graph of the path versus time is a straight line, the angle of inclination of which to the time axis $Ot$ is greater, the greater the speed of uniform motion. The tangent of this angle is equal to the speed.
We know that all bodies attract each other. In particular, the Moon, for example, is attracted to the Earth. But the question arises: if the Moon is attracted to the Earth, why does it revolve around it instead of falling towards the Earth?
In order to answer this question, it is necessary to consider the types of motion of bodies. We already know that movement can be uniform and uneven, but there are other characteristics of movement. In particular, depending on the direction, rectilinear and curvilinear movement are distinguished.
Straight-line movement
It is known that a body moves under the influence of a force applied to it. You can do a simple experiment showing how the direction of movement of a body will depend on the direction of the force applied to it. To do this, you will need an arbitrary small object, a rubber cord and a horizontal or vertical support.
Ties the cord at one end to the support. At the other end of the cord we attach our object. Now, if we pull our object a certain distance and then release it, we will see how it begins to move in the direction of the support. Its movement is caused by the elastic force of the cord. This is how the Earth attracts all bodies on its surface, as well as meteorites flying from space.
Only instead of the elastic force, the force of attraction acts. Now let’s take our object with an elastic band and push it not in the direction towards/away from the support, but along it. If the object were not secured, it would simply fly away. But since it is held by a cord, the ball, moving to the side, slightly stretches the cord, which pulls it back, and the ball slightly changes its direction towards the support.
Curvilinear movement in a circle
This happens at every moment of time; as a result, the ball does not move along the original trajectory, but also not straight to the support. The ball will move around the support in a circle. The trajectory of its movement will be curvilinear. This is how the Moon moves around the Earth without falling on it.
This is how the Earth's gravity captures meteorites that fly close to the Earth, but not directly at it. These meteorites become satellites of the Earth. Moreover, how long they will stay in orbit depends on what their initial angle of motion was relative to the Earth. If their movement was perpendicular to the Earth, then they can remain in orbit indefinitely. If the angle was less than 90˚, then they will move in a descending spiral, and gradually still fall to the ground.
Circular motion with a constant modulus speed
Another point to note is that the speed of curvilinear motion around a circle varies in direction, but is the same in value. And this means that movement in a circle with a constant absolute speed occurs uniformly accelerated.
Since the direction of movement changes, it means that the movement occurs with acceleration. And since it changes equally at each moment of time, therefore, the movement will be uniformly accelerated. And the force of gravity is the force that causes constant acceleration.
The Moon moves around the Earth precisely because of this, but if suddenly the Moon’s movement ever changes, for example, a very large meteorite crashes into it, then it may well leave its orbit and fall to the Earth. We can only hope that this moment never comes. So it goes.