Объективы canon ef s на sony. Адаптеры объективов (переходники, Speed Booster). Адаптер с электроникой
Регуляторы оборотов — в англоязычном сообществе называются — Electric Speed Controller (электронный контроллер скорости) или сокращенно — ESC. Основная задача ESC – передача энергии от аккумулятора к бесколлекторному мотору. Потребность в их применении возникла вследствие некоторых особенностей БК — мотора. Вкратце говоря, аккумулятор отдает постоянный ток, а бесколлекторный мотор принимает трехфазный переменный ток.
Принцип работы
Связь с остальными компонентами мультикоптера.
На вход ESC подается напряжение с аккумулятора и сигналы от полетного контроллера, а на выход регулятор отдает управляющее напряжение для привода. Соответственно регулятор должен обеспечивать:
- Совместимость с полетным контроллером.
- Максимальный ток для мотора (рассчитывается из спецификаций мотора и пропеллера) плюс 20 – 30%.
- Потребление тока меньше, чем ток, отдаваемый аккумулятором поделенный на количество ESC.
*Простейшая схема подключения.
Какие регуляторы бывают?
BEC и UBEC
Дополнительно к основной функции, регуляторы оборотов могут так же передавать питание к другим узлам дрона: полетному контроллеру, сервоприводам и так далее. Это достигается внедрением в регулятор блока исключения батареи — Battery Eliminator Circuit (далее как — BEC).
Использование BEC значительно упрощает конструкцию дрона, однако такая схема обладает рядом минусов. Блок исключения батареи может перегреваться при больших перепадах напряжения и больших нагрузках. К тому же регуляторы оборотов с BEC, как правило, стоят дороже, чем регуляторы без блока.
Согласитесь, логичнее и дешевле было бы сделать отдельно ESC и отдельно один BEC. Такое решение есть и называется оно универсальный блок исключения батареи (Universal Battery Eliminator Circuit, далее как — UBEC).
Преимущества UBEC
UBEC — подключается напрямую к аккумулятору и питает нужный узел дрона. Преимущества такого подхода весьма существенны:
- Регуляторы оборотов будут меньше перегреваться, поскольку из них будет исключен BEC
- UBEC обладают большим коэффициентом полезного действия
- Следовательно из предыдущих двух пунктов UBEC способен отдавать больший ток с меньшим риском
- Отсутствие переплаты за несколько лишних BEC, располагающихся в ESС. Для некоторых полетных контроллеров крайне не рекомендуется подключать больше одного ESC BEC
- Меньший вес регуляторов
Виды BEC и их преимущества
BEC бывают двух видов: линейные (LBEC) и импульсные (SBEC).
- Линейный преобразует энергию в тепло, а при перегреве отключается. Что может приводить к неприятным результатам: в лучшем случае коптер не сможет взлететь, а в худшем — неконтролируемое падение. В связи с чем стал применяться в сборке с сервоприводами, которые в свою очередь не потребляют много тока, не позволяя блоку перегреваться.
- Импульсный регулирует напряжение быстрым включением и выключением питания, такой подход исключил перегрев, повысил выходную мощность, и позволил достигать КПД 90%, а также импульсные BEC выигрывают у линейных в весе. Возникающие в цепи помехи, которые отрицательно сказываются на работе радио аппаратуры, исключаются добавлением LC — фильтра.
Учитывая то, что многие производители устанавливают на свои UBECLC фильтры (а, если фильтра все-таки нет, то его можно дешево купить и легко установить), профессионалы используют в своих коптерах именно регуляторы SBEC.
Программное обеспечение ESC
Поскольку регулятор оборотов выполняет некоторые преобразования с высокой частотой и может быть настроен на различные режимы работы для него пишут отдельный софт, называемый прошивкой. Это позволяет исправлять прошлые ошибки в алгоритмах управления, создавать более совершенные прошивки (и тем самым, например, уменьшать расходы аккумулятора на среднем газу) и производить гибкие настройки. В коптерах известных компаний типа DJI смена ПО регулятора происходит автоматически при помощи полетного контроллера.
Внимание! Перезапись ПО для регуляторов скорости может повлечь за собой поломки дрона различного характера, а так же снятие с гарантийного обслуживания! Помните, что вы делаете это на свой страх и риск!
Как сменить ПО?
Сменить программное обеспечение регулятора можно несколькими способами:
- Используя специальную плату управления
- Используя полетный контроллер
- Используя ASP программатор
Третий вариант проще и в настоящее время активно внедряется в новые модели.
Выбор регулятора оборотов
Исходя из всего вышеперечисленного, можно выделить особые критерии выбора регулятора оборотов для дрона:
- Совместимость с полетным контроллером. Полетный контроллер должен поддерживать BEC и прошивку ESC.
- Совместимость со спецификациями мотора и аккумулятора.
- Наличие или отсутствие BEС и его тип (LBEC или SBEC).
- Теплоотвод и герметичность.
Данные регули брал с КИТом коптера на али (с целью поиграться и попробовать -что же такое коптер), один сгорел до первого полета, и еще 4 в процессе учебных полетов. Вот появилось время и решил попробовать восстановить (зима, делать все-равно нечего).
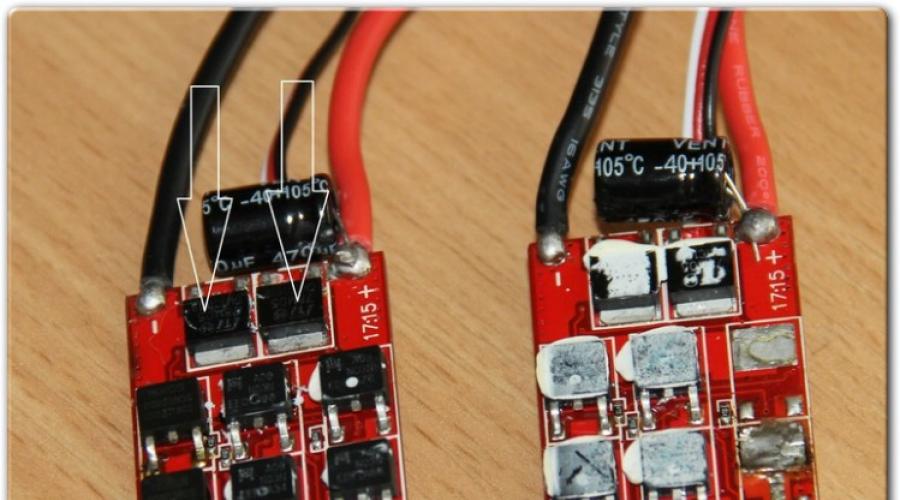
Снял термоусадку, аккуратно поддел радиатор и увидел следующую картину:

Вверху, отмеченные стрелками-5ти вольтовые стабилизаторы 78M05, с них и начал проверку.


Проверил один и второй соответственно. На всех пяти сгоревших регулях стабилизаторы оказались исправны. Ниже стабилизаторов стоят МОСФЕТ-транзисторы-вот такие:

По два на каждую фазу(вычислил методом научного тыка):

Как работают МОСФЕТы разбираться было лень, поэтому для поиска сгоревших прибег к вышеописанному научному методу, взял тестер и попробовал померять сопротивление между ножками. Сразу повезло, на рабочих мосфетах показания были такие, нижние пимерно 10кОм

Верхние мосфеты около 70кОм

Неисправные же мосфеты показали КЗ и 3кОма


Выпаивал мосфеты паяльником, но лучше конечно феном. У меня таких же на замену не было-попросил товарища, он мне навыпаивал со старых материнок вот такие:

Они не на 30 ампер, а на 50, но подошли.
У меня на всех регулях мосфеты вылетали парами(одна фаза), на одном вылетели все три фазы.
В общем из пяти регулей получилось восстановить четыре. Проверку работоспособности проводил с помощью тестера для сервопривода:

Потом намазал термопастой, поставил радиатор и одел в термоусадку:

Ну вот, собственно, и все.
Если вы хотя бы раз в процессе использования квадрокоптера задавались вопросам о предназначении той или иной детали — о ESC Motor, например, — то наша статья как раз для вас.
ESC Motor, он же Electric Speed Controller — это контроллер скорости, устанавливаемый на бесколлекторных моторах. Основная задача этой детали — передача энергии от аккумулятора к трехфазному бесколлекторному мотору и преобразование в энергию постоянного тока. Еще одна задача electric speed controller — ограничение тока, который проходит через фазы при коммутации.
Для того, чтобы разобраться с работой контроллера ESC подробнее, стоит сначала подробнее узнать об устройстве мотора, чем мы и займемся в статье ниже.
Как работает бесколлекторный мотор квадрокоптера
Бесколлекторный мотор в своей конструкции имеет три фазы (или обмотки). Условно их называют латинскими буквами А, В и С. Все проводники соединяются в фазы с выводами на конце. На картинке ниже вы можете увидеть два способа соединения:
Процессы, происходящие внутри бесколлекторного двигателя в процессе работы, схожи с реакцией рамки с током под воздействием магнитного поля — той самой, из школьных физических опытов. Рамка при помещении в магнитное поле начинала вращаться, притом совершала это движение не постоянно, а до определенного момента. Для постоянного вращения был необходим переключатель направления тока.
По аналогии с физическим опытом: в бесколлекторном моторе рама — это обмотка (или фазы), а переключатель — электроника, которая в определенные моменты подает постоянное напряжение к нужным фазам стартера.
Для того, чтобы работа двигателя была непрерывной, электроника должна уметь распознавать положение ротора. Делает это она при помощи датчиков — оптических, магнитных, дискретных и так далее. Последние, к слову, используются в большинстве современных моделей.
В бесколлекторном двигателе, имеющем три фазы, установлены три датчика соответственно. Именно благодаря им управляющая электроника всегда имеет точные сведения о положении ротора, и в какой момент и к каким фазам требуется подать напряжение.
Но также среди бесколлекторных двигателей встречаются и такие виды, в устройстве которых датчики не предусмотрены. В таком случае положение ротора электроника определяет, проводя измерение напряжения на обмотке, которая в момент проверки находится не в работе.

Когда датчики не ставят?
Бесколлекторные моторы, имеющие в своей конструкции датчики, о которых речь шла выше, считаются наиболее современными, функциональными и технически оснащенными, но вместе с тем и самыми простыми. Всё это делает их наиболее предпочтительными для установки в радиомодели. Однако в мире нет ничего идеального, поэтому такой подвид двигателя также имеет определенные минусы.
Во-первых, для корректной работы от каждого датчика в двигателе необходимо проложить провод для обеспечения питания. Во-вторых, если хотя бы один из датчиков выйдет из строя, то весь двигатель не сможет работать. В-третьих, замена датчика требует полной разборки всего двигателя, а значит относится к дорогостоящим услугам в сервисном центре.
Двигатели с датчиками преимущественно ставятся в те квадрокоптеры, запуск которых связан с большими нагрузками на вал двигателя.
Если же нагрузки на вал не предусмотрены, то можно использовать и двигатель без датчиков. Такой подвид также используется и в моделях, в которых разместить двигатель с датчиками не позволяет конструкция.
Однако, при установке двигателей такого рода стоит учитывать, что в момент запуска могут происходить колебания или вращения оси двигателя в разные стороны.
Какую характеристику Вы бы хотели улучшить в квадрокоптерах?
Обязательный электронный узел
Возвращаемся к electric speed controller. Нужен этот механизм для регулятора скорости вращения электрического магнитного поля и одновременно с этим — для подачи напряжения на те фазы, на которые необходимо.
Конструкция ESC — микроконтроллер, в который встроена программа и силовые ключи MOSFET.
Характеризуется ESC по максимальному показателю подаваемого от батареи к мотору тока.
Из-за этого нередко начинающие радиолюбители-конструкторы отдают предпочтение регуляторам с высокими показателями запаса тока — это не всегда верно. Так, зачастую можно подобрать контроллер и с меньшим запасом, однако работать он будет лучше. К тому же плюсом будет и меньшая стоимость, и меньший вес.

Но вот чем отличаются контроллеры, так это качеством — нередки, к сожалению, случаи, когда производители экономят даже на термопасте. Из-за халатного отношения к производству регуляторы быстро сгорают. Именно по этой причине, если вы выбираете между двумя ESC с идентичными характеристиками, но различной ценой — отдайте предпочтение более дорогому.
Существует два вида регуляторов скорости: BEC и UBEC. BEC — Battery Eliminator Circuit — регулятор, имеющий в своей конструкции встроенный стабилизатор напряжения. Средний показатель мощности такой модели — 5В, именно ей и обеспечивается питание приемника и многой другой аппаратуры квадрокоптера.
UBEC — Universal Battery Eliminator Circuit — съемный стабилизатор напряжения. Некоторые радиомоделисты в конструировании квадрокоптеров отдают предпочтение именно Universal Battery Eliminator Circuit, так как считают, что этот вариант — более надежный, так как не зависит от температуры регулятора.
UBEC’и также делятся на два типа: импульсные и ионные. В целом они практически идентичны, но первые особенно хороши высоким показателем коэффициента полезной деятельности (который, к слову, растет вместе с ценой на изделие) и меньшим перегревом. Однако в случае с таким видом стабилизатора крайне важно не запараллеливать питание. В работе с ионными стабилизаторами такая установка хоть и не рекомендуется, но всё же допускается.
Микроконтроллер, установленный во всех регуляторах, имеет несколько настраиваемых параметров — тормоз, напряжение, время запуска и его жесткость и так далее.

Калибровка регулятора
Несмотря на то, что калибровка регуляторов зависит от конкретной модели квадрокоптера, на котором этот контроллер используется, есть один метод, общий для всех – настройка и калибровка сразу всех регуляторов.
Стоит отметить, что если у вас квадрокоптер от компании DJI, то вам калибровка не потребуется.
Важное замечание – перед тем, как начинать калибровку контроллеров, откалибруйте радио и подключите регуляторы к моторам.
Перед началом работ всегда убеждайтесь в их безопасности – снимите пропеллеры и отключите квадрокоптер от сети или USB.
Дальнейшие работы будут проходить в несколько этапов.
На первом этапе включите пульт дистанционного управления и выведите стик, отвечающий за подачу мощности, в максимальное положение. Если после подключения литий-полимерного аккумулятора огни на полётной аппаратуре начали циклически загораться красным, синим и желтым, значит, вы всё сделали правильно и APM готов к процедуре калибровки.
На втором этапе, не трогая стик мощности, отключите и снова подключите аккумулятор. Благодаря этой процедуре включится режим калибровки для автопилота. Подтверждением этому будет поочередное мигание красных и синих светодиодных огней, словно на автомобиле полиции.
Только после того, как прозвучит сигнал ровно столько раз, сколько банок имеет ваш аккумулятор (например, для 3S должно быть 3 сигнала), вы сможете убрать стик мощности в минимальное положение.
Если после этого вы услышите однократный, но продолжительный сигнал – значит, процесс калибровки окончен.
В качестве проверки немного поддайте моторам газу – если они начали вращаться, то всё сделано верно.
На третьем этапе совершается выход из режима калибровки регуляторов скорости – для этого стик мощности устанавливается в минимальное положение, а аккумулятор отключается.
Более подробную инструкцию о калибровке контроллеров вы можете посмотреть на видео ниже.
Возможно, кому-нибудь пригодится мой опыт создания регулятора скорости для радиоуправляемой модели.
Это было почти 15 лет тому назад, в то время были распространены коллекторные моторы. Бесколлекторные двигатели и контроллеры скорости только начинали появляться и стоили очень дорого. Тогда мне очень нужен был регулятор скорости (ESC) для коллекторного мотора радиоуправляемой машинки. Озадачился этим вопросом и нашел схему, которую самостоятельно мог бы собрать. Детали некоторые были в наличии, что-то прикупил в магазине радиодеталей, все вышло достаточно дешево. Сейчас стоимость нового регулятора не так высока, как раньше, порой бывает дешевле купить, но моделист не ищет легких путей.
Схема регулятора следующая.
Регулятор работает от 6 до 15 В. Управляющий канал 4,8 - 6 В
Контроллер решил сделать на монтажной плате. Хотя ее можно было и вытравить в кислоте (рисунок был). Для этого потребуется однослойный стеклотекстолит.

Транзисторы
T 1 = BD 676 или BD 678
T 2 = BD 675 или BD 677
T 3 = BD 676 или BD 678
T 4 = BD 675 или BD 677
Резисторы
P 2 = 250 кОм
Сопротивления
R 7 = 2.7 кОм
Конденсаторы
C 3 = 0,010 мФ
Микросхема

Первые тесты показали, что транзисторам приходится очень тяжело, в пиках наблюдались достаточно большие нагрузки. В связи с этим они были выпаяны с платы, приведенным в спецификации транзисторам подобраны более мощные аналоги по каталогу (КТ853В и КТ829А).

Так как при повышении нагрузок выделяется тепло, то его нужно куда-то отводить. Для этого подобрал радиатор. Радиатор использовал от компьютера, старый и ненужный все равно валялся без дела, а тут пригодился. Вентилятор с него решил не снимать, так как источник питания 12В, то подключил напрямую к силовой батарее. Транзисторы прикрутил к радиатору с помощью винтов.

Радиатор распилил на две части, это было необходимо по конструктиву схемы.

Длинные шпильки сверху держат кулер, а с другой стороны прижимают к радиатору транзисторы для эффективного охлаждения. Снизу в качестве изолятора закрепил пластинку стеклотекстолита.
Регулятор нужно откалибровать с помощью переменных резисторов, они позволяют настроить регулятор. Первый отвечает за нулевое значение, второй за максимальный газ. Переводим стик газа в соответствующую позицию и настраиваем регулятор.
В собранном виде все выглядит так.

Для создания миниатюрных моделей с малыми нагрузками охлаждение не требуется. Контроллер без радиатора получился размером 25 Х 25 мм, что достаточно компактно.
Если ESC подвергать высоким нагрузкам, то, безусловно, требуется система охлаждения.
Данный регулятор был установлен на радиоуправляемую машинку вместо электро-механического переключателя. В целом регулятор оправдал ожидания и до сих пор выполняет свою функцию.